• Homing is started and home is defined when the home input signal turns ON after the axis trav-
els the home input mask distance after the home proximity input signal turns ON while the
velocity is below the homing approach velocity
.
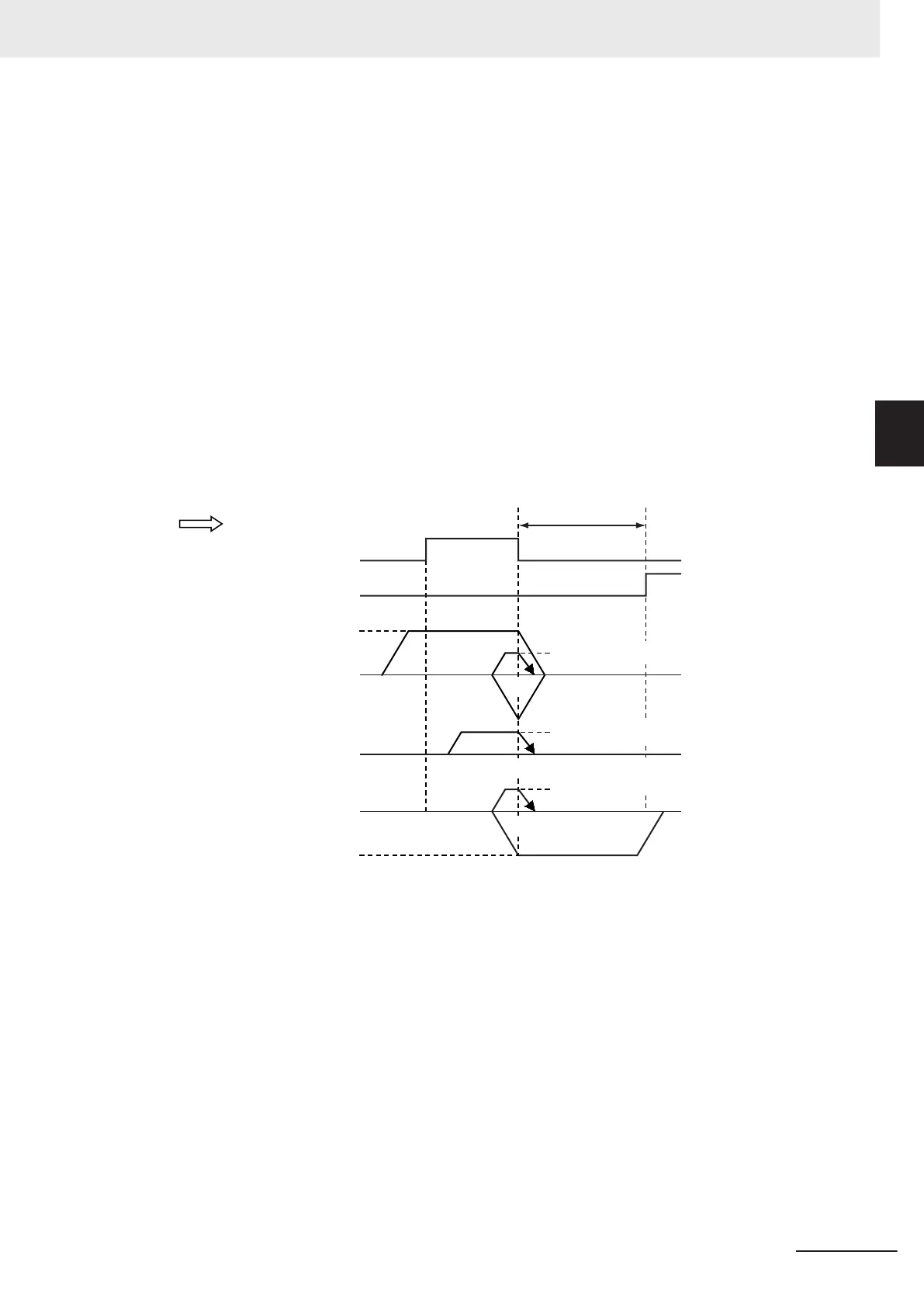
11: Operation for Limit Inputs Only
1 The axis starts at the homing velocity. When the limit signal in the direction opposite to the home
input detection direction turns OFF
, the axis decelerates to a stop.
2 After the axis stops, the axis moves in the other direction at the homing velocity and decelerates
to a stop when the limit signal turns ON.
3 After the axis stops, the axis moves in the other direction at the homing approach velocity. The
position where the limit signal turns OFF is defined as home and an immediate stop is performed
(i.e., a stop using remaining pulses). The axis does not return to the home position.
Positi
ve direction
Positive direction
Positive direction
Start
Start
Negative direction
Homing velocity
Negative direction
Homing velocity
Negative direction
Positive limit input signal
Negative limit input signal
Home input detection direction
Range of movement
Stops using
remaining pulses.
Start
ON
OFF
ON
OFF
Hom
ing approach velocity
Homing approach velocity
Homing approach velocity
Home
Home
Home
Stops using
remaining pulses.
Stops using
remaining pulses.
• If you use only the limit signals to perform homing, the point at which the limit signal turns OFF
during operation in the home input detection direction is set as the home detection position.
•
If you start homing while the limit signal in the home input detection direction is ON, the opera-
tion will start at the homing velocity in the direction opposite to the home input detection direc-
tion. When the limit signal in the direction opposite to the home input detection direction turns
ON, the axis decelerates to a stop.
• Even if the limit signal turns OFF before the axis decelerates to a stop after the limit signal is
detected, home is not defined and the axis continues to decelerate. In this case, no error will
occur.
• Home is defined if the limit signal turns OFF before the homing approach velocity is reached
after the axis reverses or after starting while the limit signal is input.
Differences between Homing Operation Mode 11 and Other Homing Operation Modes
3 Axis Command Instructions
3-29
NY-series Motion Control Instructions Reference Manual (W561)
MC_Home
3
Function