A-1
Instructions for Which Multi-execu-
tion Is Supported
Whether multi-execution of motion control instructions is supported depends on the current axis sta-
tus, the current axes group status, and the instruction to execute. This section describes the relation-
ships between these.
For details on multi-execution of instructions, refer to the NY-series Industrial Panel PC / Industrial Box
PC Motion Control User’s Manual (Cat. No. W559).
Precautions for Correct Use
• Only one instruction is buffered for each single axis. If you attempt to perform multi-execution
for two or more instructions, an instruction error will occur.
• Up to seven instructions can be buffered at the same time for a single axes group. If you at-
tempt to perform multi-execution for eight or more instructions, an instruction error will occur.
• Multi-execution of instructions cannot be used to execute an axes group command instruction
for an axis that is operating for an axis command instruction. Multi-execution of instructions
cannot be used to execute an axis command instruction for an axis that is operating for an
axes group command instruction. An instruction error will occur if these rules are broken.
A-1-1
Axis and Axes Group Status
Whether multi-execution of motion control instructions is supported depends on the current axis status
and the current axes group status. You can use the Axis variable and the Axes Group variable of the
relevant axis to find the axis status and the axes group status.
For details on axis status, axes status, Axis variables, and Axes Group variables, refer to the NY-
series Industrial Panel PC / Industrial Box PC Motion Control User’s Manual (Cat. No. W559).
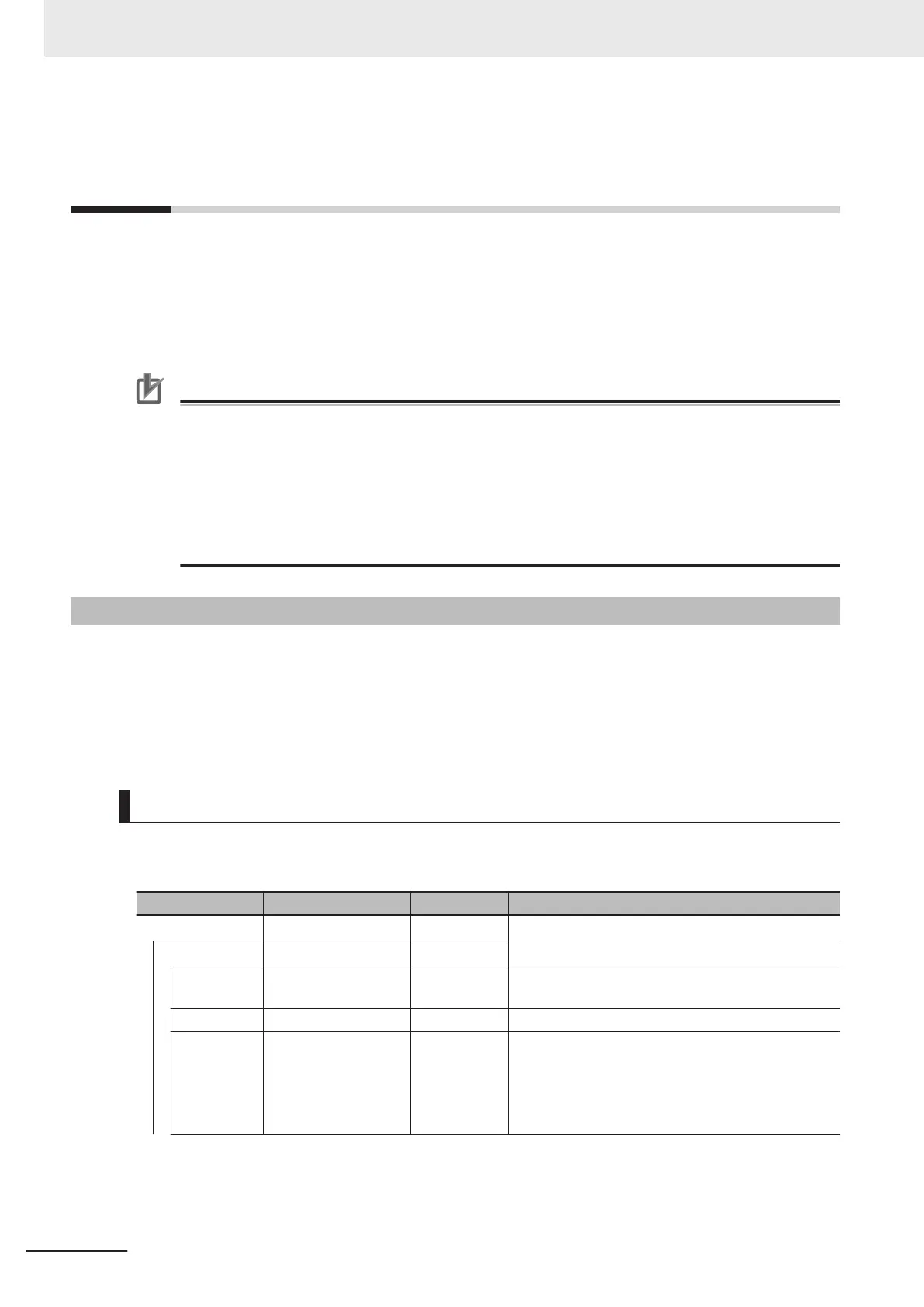
Variables in an Axis Variable That Give the Axis Status
The following nine variables in an Axis variable give the status of the axis. These variables are mutual-
ly exclusive. Only one of them can be TRUE at any one time.
Name Data type Meaning Function
_MC_AX[0-63] _sAXIS_REF Axis Variable
Status _sAXIS_REF_STA Axis Status
Disabled BOOL Axis Disa-
bled
TRUE while the Servo is OFF for the axis.
Standstill BOOL Standstill TRUE while the Servo is ON for the axis.
Descrete BOOL Discrete Mo-
tion
TRUE while position control is executed toward the
target position.
This includes when the velocity is 0 because the
override factor was set to 0 during a discrete mo-
tion.
Appendices
A-2
NY-series Motion Control Instructions Reference Manual (W561)