*16. If the Count Mode is set to Linear Mode, the position just before an underflow is given. In Rotary Mode, the modulo
minimum position is given.
2-1-3
Axes Group Variables
The variable name of the system-defined Axes Group Variable is _MC_GRP[0..31]. The data type is
_sGROUP_REF
, which is a structure.
In the descriptions of functions, _MC_AX[*] is used as an example.
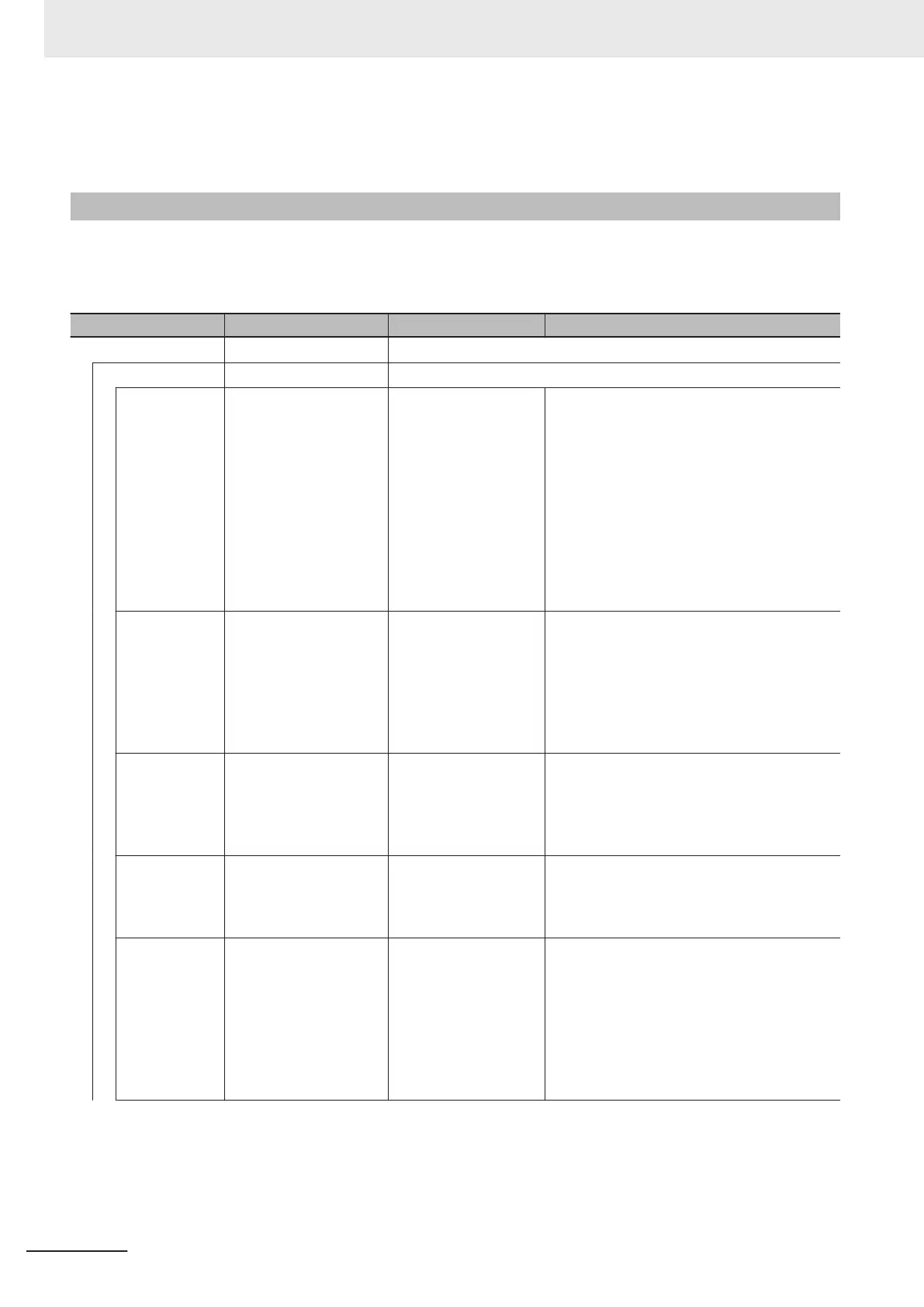
Name Data type Meaning Function
_MC_GRP[0..31] _sGROUP_REF Axes Group Variable
Status _sGROUP_REF_STA Axes Group Status
Ready BOOL Ready-to-execute TRUE when the axes group is stopped and is
ready to execute.
The condition for being ready to execute is an
AND of the following conditions.
• Execution of the MC_Stop instruction is not
in progress for a composition axis.
• _MC_GRP[*].Status.Standby (standby) is
TRUE.
• The Servo is ON for the composition axes.
• _MC_AX[*].Details.Homed is TRUE (home
defined) for the composition axes.
Disabled BOOL Axes Group Disabled TRUE when the axes group is disabled and
stopped.
The following axes group status are mutually
exclusive. Only one of them can be TRUE at
a time.
Disabled, Standby
, Moving, Stopping, or Er-
rorStop
Standby BOOL Standby TRUE when the axes group motion instruc-
tion is stopped.
This is not related to the Servo ON/OFF sta-
tus of the composition axes in the axes
group.
Moving BOOL Moving TRUE while an axes group motion instruction
is executed toward the target position.
This includes in-position waiting status and
when the velocity is 0 for an override.
Stopping BOOL Deceleration Stopping TRUE until the axes group stops for an
MC_GroupStop instruction.
This includes when Execute is TRUE after
the axis stops for an MC_GroupStop instruc-
tion.
Axes group motion instructions are not exe-
cuted while decelerating to a stop. (Comman-
dAborted is TRUE)
2 Variables and Instructions
2-10
NY-series Motion Control Instructions Reference Manual (W561)