MC_GearInPos
The MC_GearInPos instruction performs electronic gear operation for the specified gear ratio between
the master axis and the slave axis.
The positions at which to start synchronizing the master axis and slave axis are specified.
Instruction Name
FB/
FUN
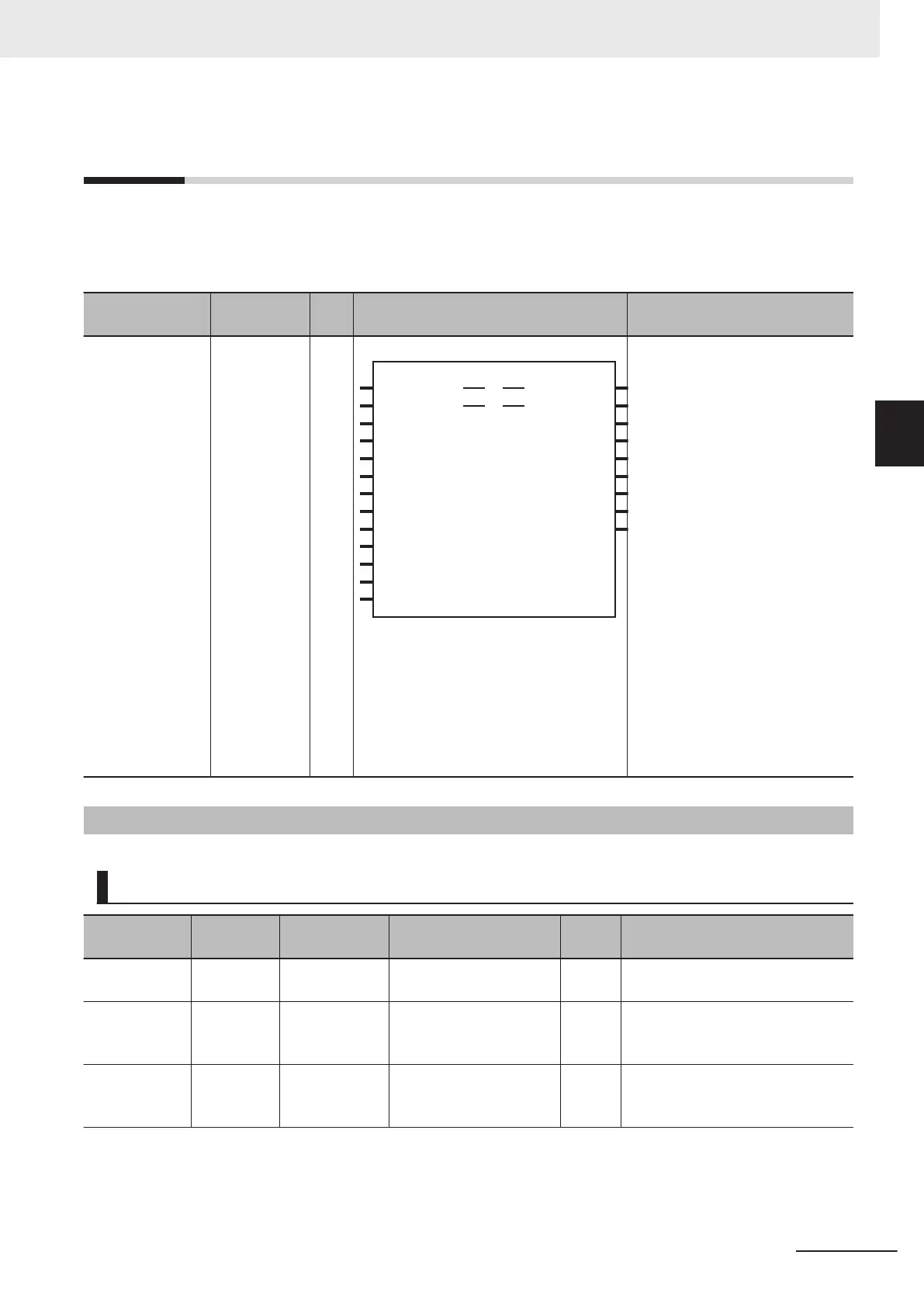
Graphic expression ST expression
MC_GearInPos Positioning
Gear Opera-
tion
FB
Velocity
Acceler
ation
Deceleration
Jerk
BufferMode
MC_GearInPos_instance
ReferenceType
Master Master
Slave Slave
Execute StartSync
RatioDenominator
InSync
Error
ErrorID
CommandAbortedMasterSyncPosition
Active
SlaveSyncPosition
MC_GearInPos
RatioNumerator
Busy
MC_GearInPos_instance (
Master :=parameter,
Slave :=parameter,
Execute :=parameter,
RatioNumerator :=parameter,
RatioDenominator :=parameter,
ReferenceT
ype :=parameter,
MasterSyncPosition :=parameter,
SlaveSyncPosition :=parameter,
Velocity :=parameter,
Acceleration :=parameter,
Deceleration :=parameter,
Jerk :=parameter,
BufferMode :=parameter,
StartSync =>parameter,
InSync =>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALSE The instruction is executed when
this variable changes to TRUE.
RatioNumera-
tor
Gear Ratio
Numerator
DINT Positive or negative num-
ber
10,000 Specify the numerator of the elec-
tronic gear ratio between the mas-
ter and slave axes.
RatioDenomi-
nator
Gear Ratio
Denomina-
tor
UDINT Positive number 10,000 Specify the denominator of the
electronic gear ratio between the
master and slave axes.
3 Axis Command Instructions
3-267
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearInPos
3
Variables