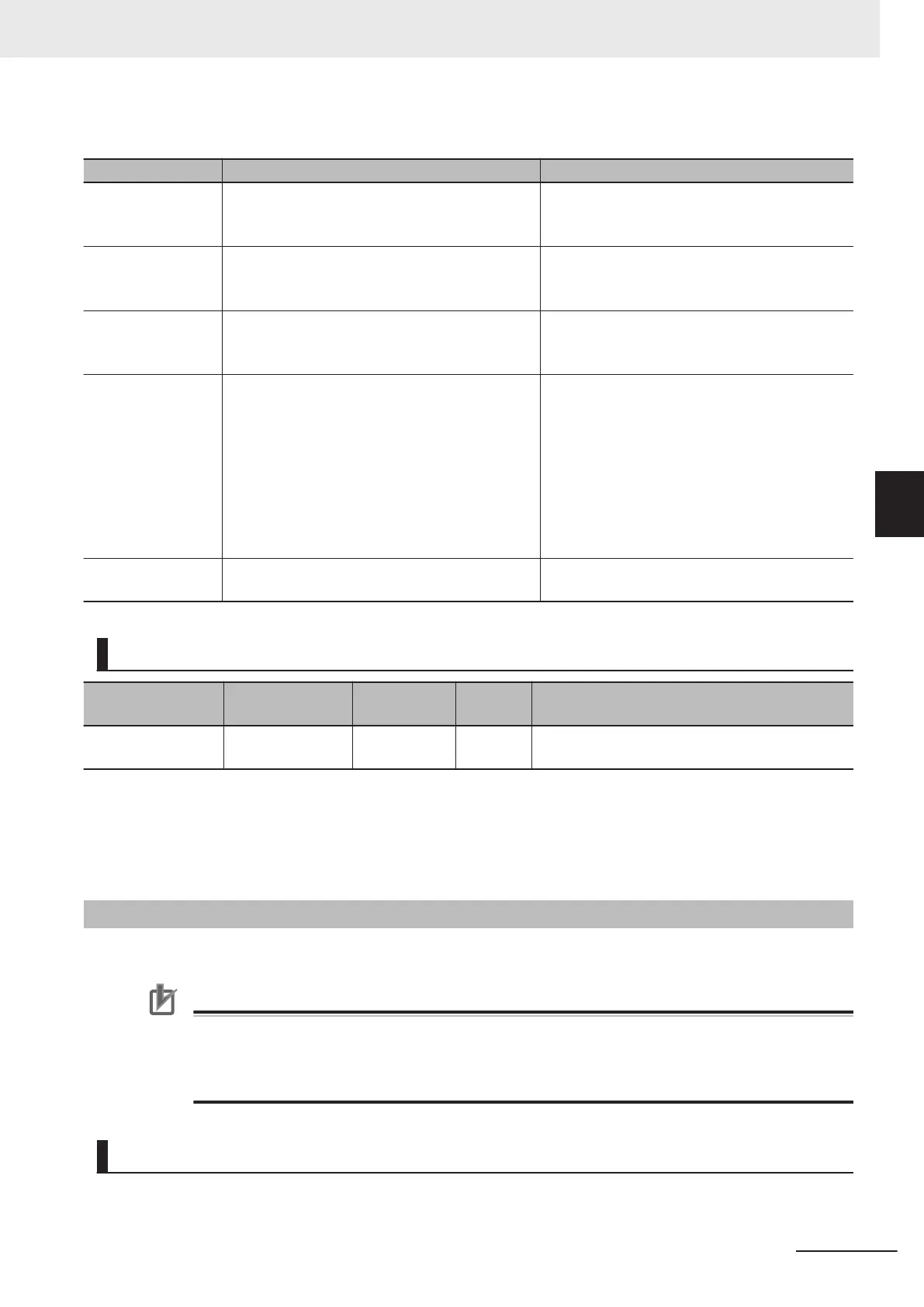
Output Variable Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
Done When positioning is completed.
• When Execute is TRUE and changes to
F
ALSE.
• After one period when Execute is FALSE.
Busy When Execute changes to TRUE.
• When Done changes to TRUE.
• When Error changes to TRUE.
• When CommandAborted changes to TRUE.
Active When the axes move.
• When Done changes to TRUE.
• When Error changes to TRUE.
• When CommandAborted changes to TRUE.
CommandAborted
• When this instruction is aborted because an-
other motion control instruction was executed
with the Buf
fer Mode set to Aborting.
• When this instruction is canceled due to an er-
ror.
• When this instruction is executed while there is
an error.
• When you start this instruction during
MC_GroupStop instruction execution.
• When Execute is TRUE and changes to
FALSE.
• After one period when Execute is FALSE.
Error When there is an error in the execution condi-
tions or input parameters for the instruction.
When the error is cleared.
In-Out Variables
Name Meaning Data type
Valid
range
Description
AxesGroup Axes Group _sGROUP_R
EF
---
Specify the axes group.
*1
*1. Specify a user-defined Axes Group Variable that was created in the Axes Group Basic Settings of the Sysmac Studio
(default: MC_Group*) or a system-defined axes group variable name (_MC_GRP[*]).
If you use Sysmac Studio version 1.29 or higher
, you can specify the system-defined axes group variable name for AT
specification of a user-defined variable. This will allow you to specify the user-defined variable.
If you use Sysmac Studio version 1.28 or lower, do not specify any user-defined variable created in the variable table.
Function
• The MC_MoveLiner instruction performs linear interpolation for 2 to 4 axes.
Precautions for Correct Use
• An Instruction Execution Error with Undefined Home (error code: 5466 hex) occurs if home is
undefined for any of the composition axes in the axes group.
•
You cannot execute an instruction to perform linear interpolation if a limit input is ON for any
of the logical axes that belong to the axes group.
Instruction Details
This section describes the instruction in detail.
4 Axes Group Instructions
4-13
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveLinear
4
Function