MC_SetPosition
The MC_SetPosition instruction changes the command current position or the actual current position
of an axis as required.
Instruction Name
FB/
FUN
Graphic expression ST expression
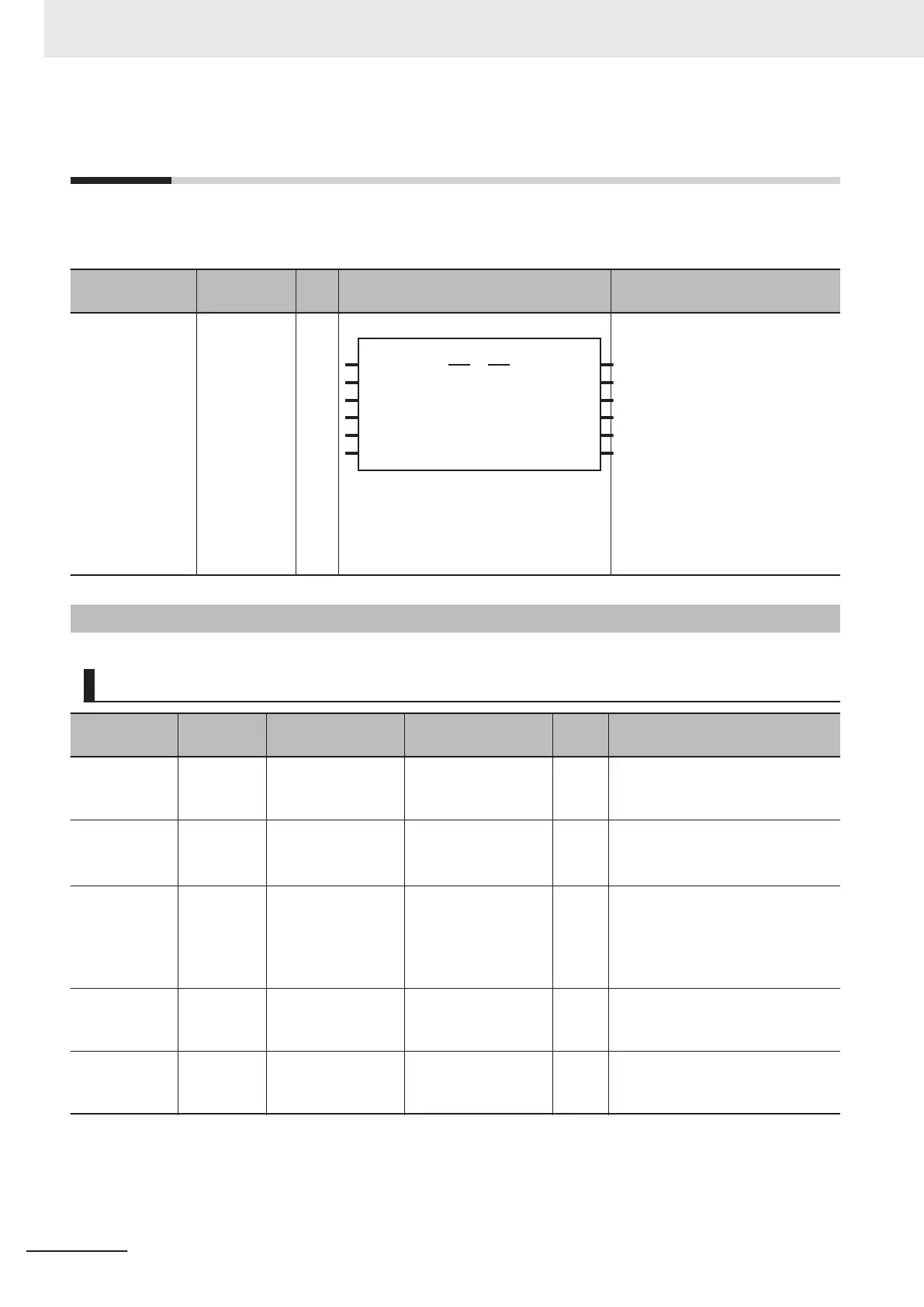
MC_SetPosition Set Position FB
MC_SetP
osition_instance
ReferenceType
Axis Axis
Position
Execute
Error
ErrorID
CommandAborted
MC_SetPosition
Done
Busy
ExecutionMode
Relative
MC_SetPosition_instance (
Axis :=parameter,
Execute :=parameter,
Position :=parameter,
ReferenceT
ype :=parameter,
Relative :=parameter,
ExcutionMode :=parameter,
Done =>parameter,
Busy =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALS
E
The instruction is executed when
the value of this variable changes
to TRUE.
Position Target Posi-
tion
LREAL Negative number,
positive number
, or 0
0 Specify the absolute target posi-
tion.
The unit is command units.
*1
ReferenceType Position
T
ype Selec-
tion
_eMC_REFER-
ENCE_TYPE
0: _mcCommand
1: _mcFeedback
0
*2
Specifies the position type.
0: Command position (servo axis
or virtual servo axis)
1: Actual position (encoder axis or
virtual encoder axis)
Relative
(Reserved)
Relative
Position Se-
lection
BOOL TRUE or FALSE FALS
E
(Reserved)
Execution-
Mode
(Reserved)
Execution
Mode
_eMC_EXECU-
TION_MODE
0: _mcImmediately
0
*2
(Reserved)
*1. Refer to Unit Conversion Settings in the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*2. The default value for an enumeration variable is actually not the number, but the enumerator.
3 Axis Command Instructions
3-154
NY-series Motion Control Instructions Reference Manual (W561)