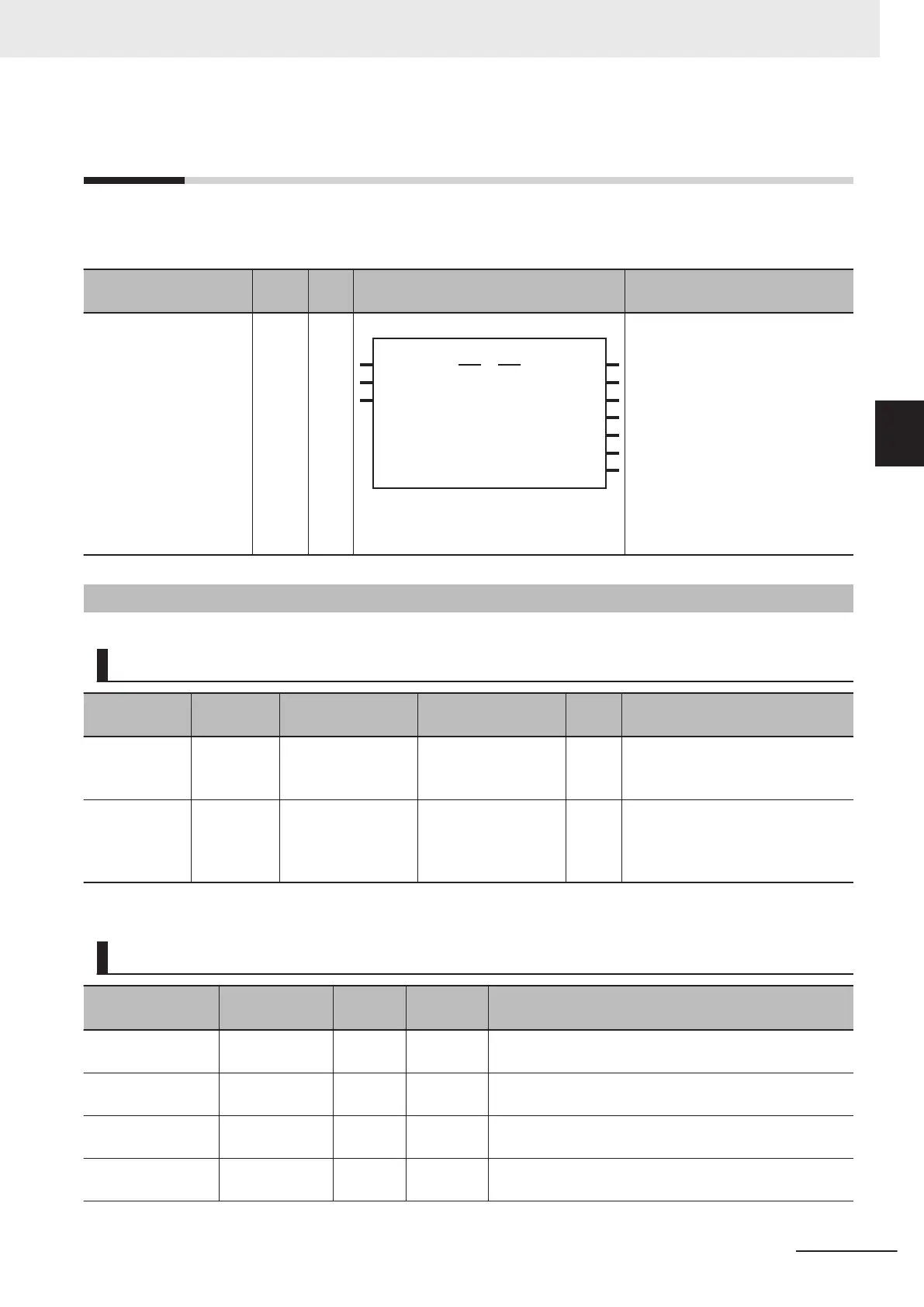
MC_ResetFollowingError
The MC_ResetFollowingError instruction resets the following error between the command current po-
sition and the actual current position.
Instruction Name
FB/
FUN
Graphic expression ST expression
MC_ResetFollowingError Reset
Fol-
lowing
Error
Coun-
ter
FB
MC_ResetFollowingError_instance
Active
Axis Axis
Execute Done
BufferMode Busy
Error
MC_ResetFollowingError
CommandAborted
ErrorID
MC_ResetFollowingError_in-
stance (
Axis :=parameter,
Execute :=parameter,
Buf
ferMode :=parameter,
Done =>parameter,
Busy =>parameter,
Active =>parameter,,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALS
E
The instruction is executed when
the value of this variable changes
to TRUE.
BufferMode Buffer
Mode Se-
lection
_eMC_BUF-
FER_MODE
0: _mcAborting
0
*1
Specify the behavior when execut-
ing more than one motion instruc-
tion.
0: Aborting
*1. The default value for an enumeration variable is actually not the number, but the enumerator.
Output Variables
Name Meaning
Data
type
Valid
range
Description
Done Done BOOL TRUE or
F
ALSE
TRUE when the instruction is completed.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Active Controlling BOOL TRUE or
F
ALSE
TRUE when the axis is being controlled.
CommandAborted Command
Aborted
BOOL TRUE or
F
ALSE
TRUE when the instruction is aborted.
3 Axis Command Instructions
3-167
NY-series Motion Control Instructions Reference Manual (W561)
MC_ResetFollowingError
3
Variables