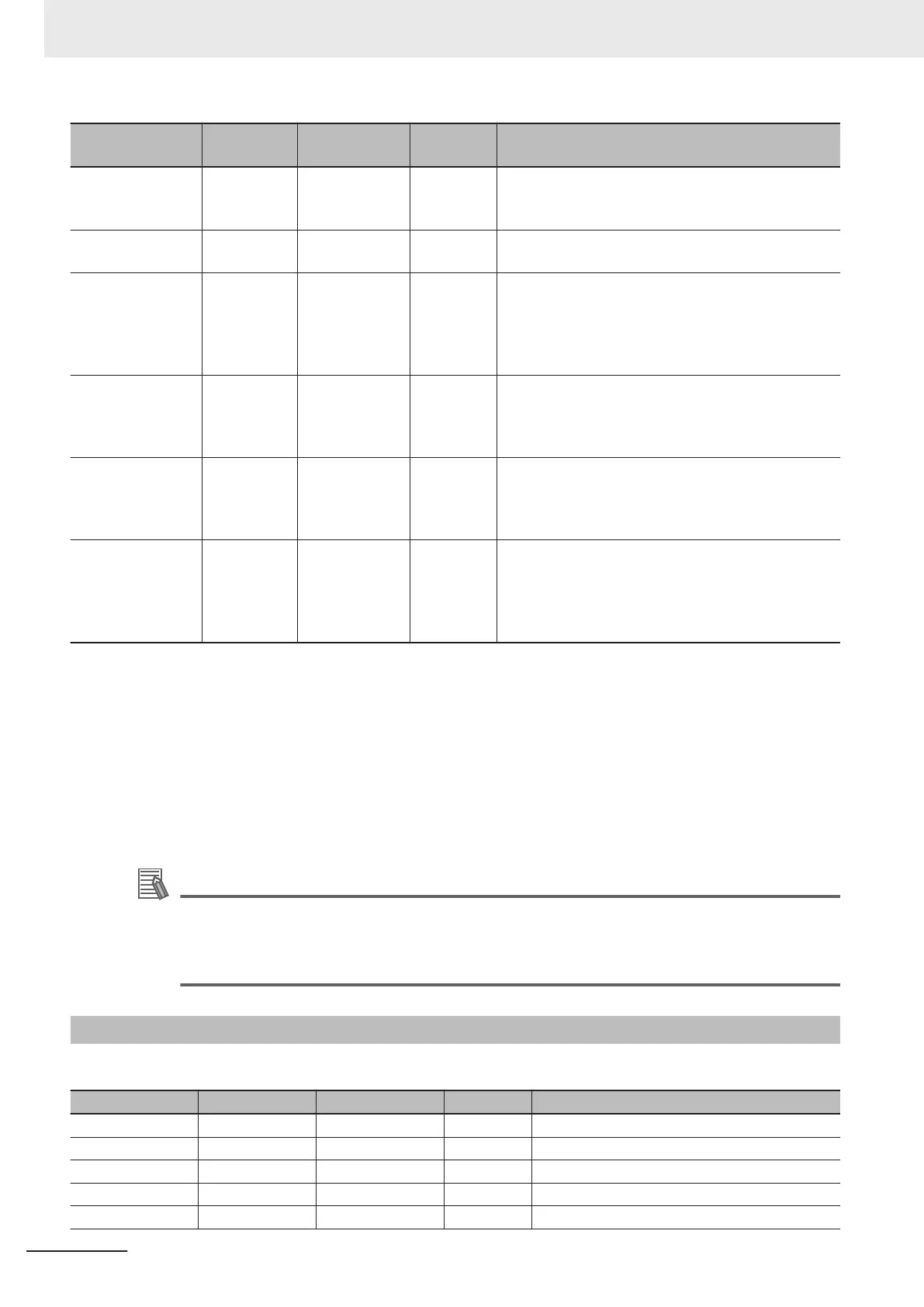
Name Meaning Data type
Valid
range
Description
InPosition In Position BOOL TRUE or
F
ALSE
TRUE when the actual current positions for all com-
position axes are within the in-position range of their
target positions.
InOperation In Operation BOOL TRUE or
F
ALSE
TRUE when the operation for the instruction is in
progress.
CalcPosition Calculated
Position
LREAL Negative
number
,
positive
number, or
0
Contains the position for the specified time stamp.
*3
ErrorParameter-
Code
Parameter
Detail Code
WORD
*2
Contains the attached information for some error co-
des.
If the information is saved, the detail code of the pa-
rameter for which the error occurred is output.
ErrorNodePointIn-
dex
Node Point
Element
Number
UINT
*2
Contains the attached information for some error co-
des.
If the information is saved, the element number of the
node point for which the error occurred is output.
OutputtedOffset-
Position
Position Off-
set Output
V
alue
LREAL Negative
number,
positive
number, or
0
Contains the position offset that was added to the
command current position.
The value is updated when Active is TRUE.
Updating is stopped and the value is retained when
CommandAborted or Error is TRUE.
*1. Error is not reset to F
ALSE until you execute one of the following instructions: MC_Reset, MC_GroupReset, or Re-
setMCError.
This behavior is different from the PLCopen
®
specifications. With PLCopen
®
specifications, it changes to FALSE when
Execute changes to FALSE.
When Error is TRUE, the motion control instruction is not executed. Instructions are not executed after an error is
cleared even if Execute is TRUE. The value of this variable must change from FALSE to TRUE to execute the instruc-
tion. Enable-type motion control instructions are executed whenever their Enable variable is TRUE.
*2. The upper four digits of the event code give the error code for ErrorID. Refer to the NY
-series Troubleshooting Manual
(Cat. No. W564) for the event codes.
*3. This unit is command units. The command unit is millimeters, micrometers, nanometers, degrees, inches, or pulses.
Additional Information
To enable accessing output variables for motion control instructions even after the operating
mode is changed, assign variables that have output parameters with a retain attribute.
By accessing the assigned output parameter
, you can access the output variable immediately
before the operating mode changed.
2-1-6
In-Out Variables for Motion Control Instructions
The following table lists the in-out variables for motion control instructions.
Name Meaning Data type Valid range Description
Axis Axis _sAXIS_REF --- Specifies the axis.
AxesGroup Axes Group _sGROUP_REF --- Specifies the axes group.
Auxiliary Auxiliary Axis _sAXIS_REF --- Specifies the auxiliary axis.
Master Master Axis _sAXIS_REF --- Specifies the master axis.
Slave Slave Axis _sAXIS_REF --- Specifies the slave axis.
2 Variables and Instructions
2-30
NY-series Motion Control Instructions Reference Manual (W561)