MC_TorqueControl
The MC_TorqueControl instruction uses the Torque Control Mode of the Servo Drive to control the tor-
que.
Instruction Name
FB/
FUN
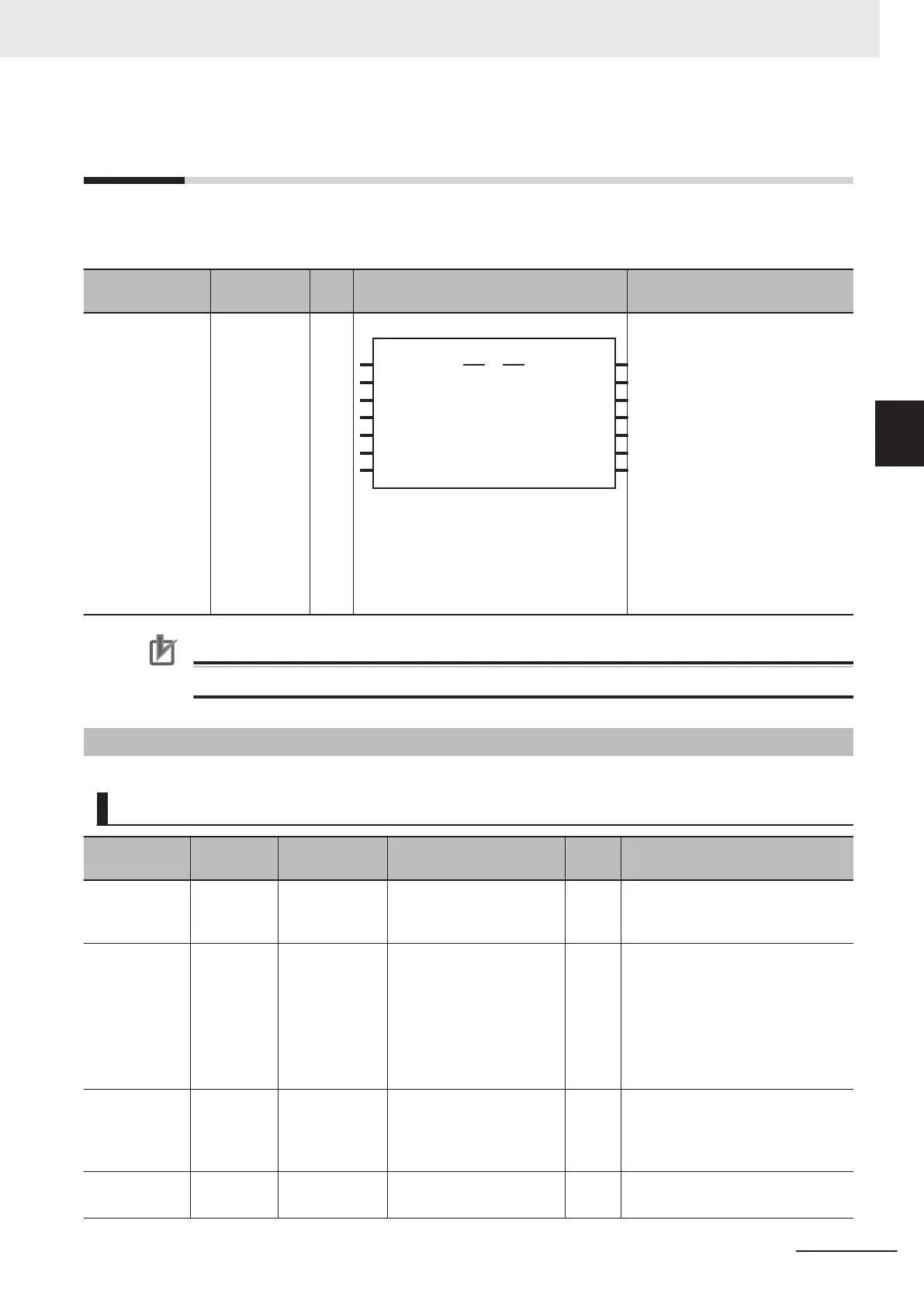
Graphic expression ST expression
MC_TorqueCon-
trol
Torque Con-
trol
FB
MC_TorqueControl_instance
Direction
Axis Axis
Execute InTorque
Torque
Velocity
Error
ErrorID
CommandAborted
BufferMode
Active
MC_TorqueControl
TorqueRamp
Busy
MC_TorqueControl_instance (
Axis :=parameter,
Execute :=parameter,
T
orque :=parameter,
TorqueRamp :=parameter,
Velocity :=parameter,
Direction :=parameter,
BufferMode :=parameter,
InTorque =>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Precautions for Correct Use
You cannot use this instruction for an NX-series Pulse Output Unit.
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALS
E
The instruction is executed when
the value of this variable changes
to TRUE.
Torque Target Tor-
que
LREAL 0 to 1000.0 300.0 Specify the target torque to output
to the Servo Drive in increments of
0.1%.
Specify a percentage of the rated
torque, i.e., the rated torque is
100.0%.
*1
The unit is %.
TorqueRamp Torque
Ramp
LREAL Non-negative number 0 Specify the change rate of torque
from the current value to the target
torque.
The unit is %/s.
Velocity Velocity
Limit
LREAL Non-negative number 0 Specify the target velocity. The unit
is command units/s.
*2
3 Axis Command Instructions
3-335
NY-series Motion Control Instructions Reference Manual (W561)
MC_TorqueControl
3
Variables