*2. Specify the encoder axis that is assigned to the NX-series Encoder Input Unit or the axis for the OMRON 1S-series
Servo Drive with built-in EtherCA
T communications.
Function
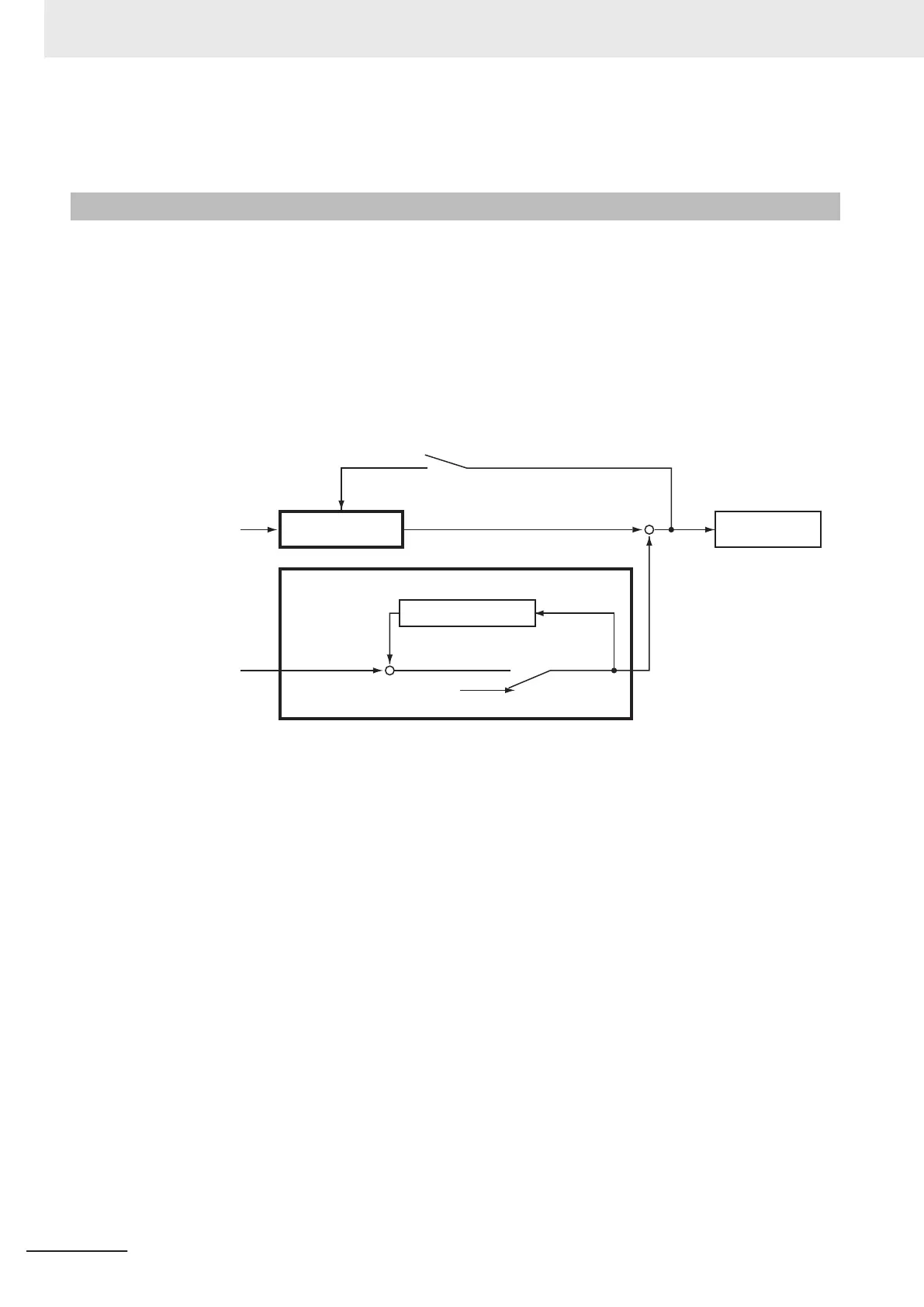
• The MC_SyncOffsetPosition instruction adds an offset that is calculated based on the value of the
OffsetPosition (Position Of
fset) input variable to the command current position and outputs the result
to the Servo Drive.
• You can change the value of the OffsetPosition (Position Offset) input variable while the Active
(Controlling) output variable is TRUE.
• The starting point for this instruction is used as the starting point for OffsetPosition (Position Offset)
as long as Active (Controlling) of this instruction is TRUE. Refer to Repeatedly Starting and Stop-
ping this Instruction on page 3-451 for details.
MC_SyncOffsetPosition instruction
Command position
after addition of of
fset
Command position
before addition of offset
Offset
Motion instruction
Servo Drive
(CSP)
Position offset
T
arget position
First position
Switch 1
Switch 2
-
+
+
+
0
Previous position of
fset
a) Switch 1 is turned ON only once when Execute of the motion instruction is changed to TRUE.
b) Switch 2 is ON while Active (Controlling) of the MC_SyncOf
fsetPosition instruction is TRUE.
c) When switch 2 is OFF, the offset that is added to the command position is 0.
• You can execute this instruction only for a slave axis that is currently in synchronized control.
• After execution of this instruction is started, CommandAborted (Instruction Aborted) changes to
TRUE after Done, CommandAborted (Instruction Aborted), or Error of the target synchronized con-
trol instruction changes to TRUE.
• If CommandAborted (Instruction Aborted) or Error of this instruction changes to TRUE, the offset
that was previously added to the command position is retained.
• The following timing chart shows execution of this instruction while execution of the MC_GearIn
(Start Gear Operation) instruction is in progress in the primary periodic task and then
CommandAborted (Instruction Aborted) of the MC_GearIn (Start Gear Operation) instruction
changes to TRUE.
3 Axis Command Instructions
3-450
NY-series Motion Control Instructions Reference Manual (W561)