MC_MoveZeroPosition
The MC_MoveZeroPosition instruction performs positioning with an absolute position of 0 as the target
position to return to home.
Instruction Name
FB/
FUN
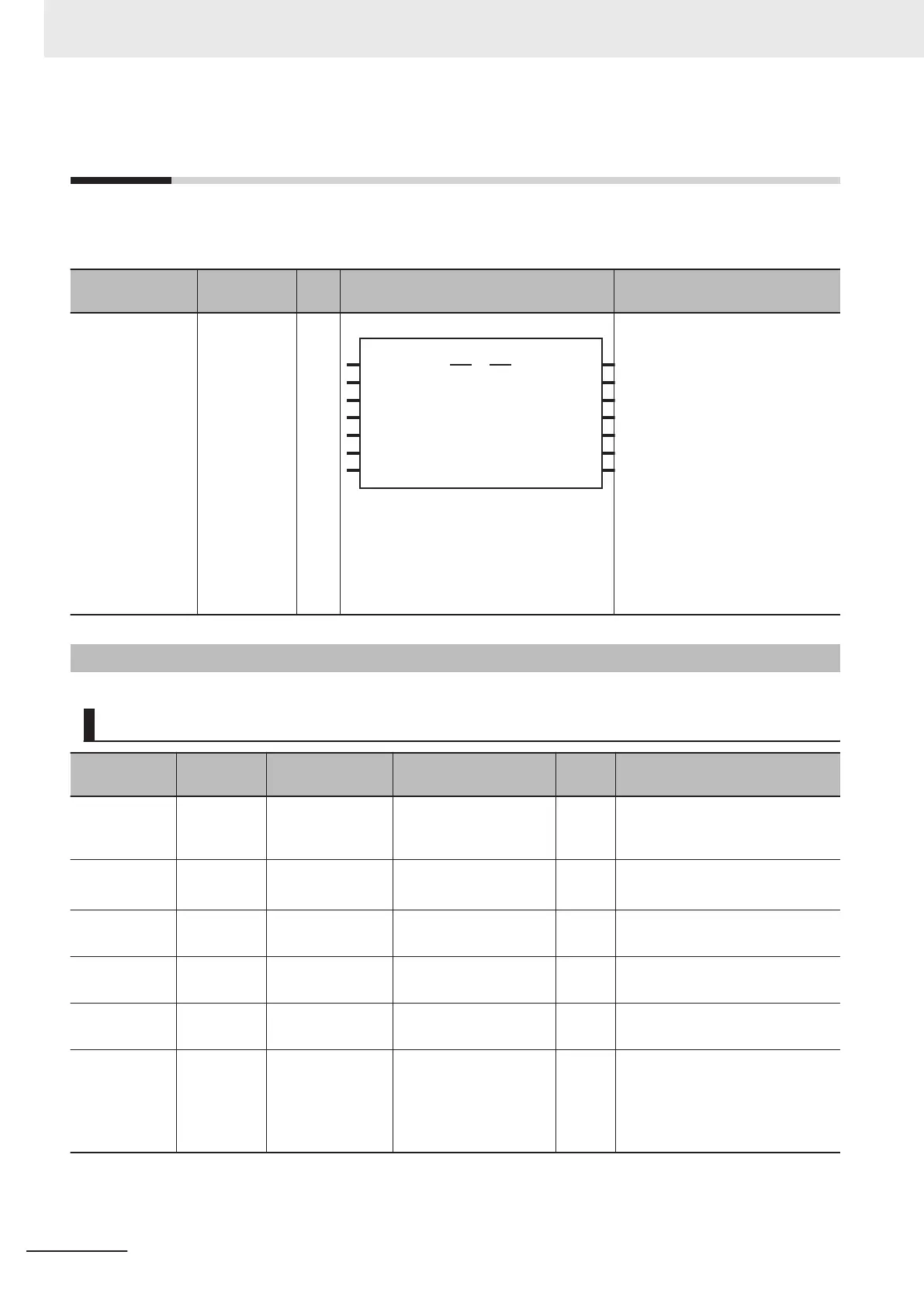
Graphic expression ST expression
MC_MoveZero-
Position
High-speed
Home
FB
MC_MoveZeroPosition_instance
Jerk
Active
Axis Axis
Execute Done
Velocity Busy
Deceleration
Error
BufferMode
MC_MoveZeroPosition
Acceleration
CommandAborted
ErrorID
MC_MoveZeroPosition_instance (
Axis :=parameter,
Execute :=parameter,
V
elocity :=parameter,
Acceleration :=parameter,
Deceleration :=parameter,
Jerk :=parameter,
BufferMode :=parameter,
Done =>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALSE The instruction is executed when
the value of this variable changes
to TRUE.
Velocity Target Ve-
locity
LREAL Positive number 0
Specify the target velocity.
*1
The unit is command units/s.
*2
Acceleration Accelera-
tion Rate
LREAL Non-negative number 0 Specify the acceleration rate.
The unit is command units/s
2
.
*2
Deceleration Decelera-
tion Rate
LREAL Non-negative number 0 Specify the deceleration rate.
The unit is command units/s
2
.
*2
Jerk Jerk LREAL Non-negative number 0 Specify the jerk.
The unit is command units/s
3
.
*2
BufferMode Buffer Mode
Selection
_eMC_BUF-
FER_MODE
0: _mcAborting
1: _mcBuf
fered
0
*3
Specify the behavior when exe-
cuting more than one motion in-
struction.
0: Aborting
1: Buffered
*1. Always set the target velocity. If the axis is moved without setting a target velocity, an error will occur.
*2. Refer to Unit Conversion Settings in the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*3. The default value for an enumeration variable is actually not the number, but the enumerator.
3 Axis Command Instructions
3-104
NY-series Motion Control Instructions Reference Manual (W561)