MC_DigitalCamSwitch
The MC_DigitalCamSwitch instruction turns a digital output ON or OFF according to the axis position.
Instruction Name
FB/
FUN
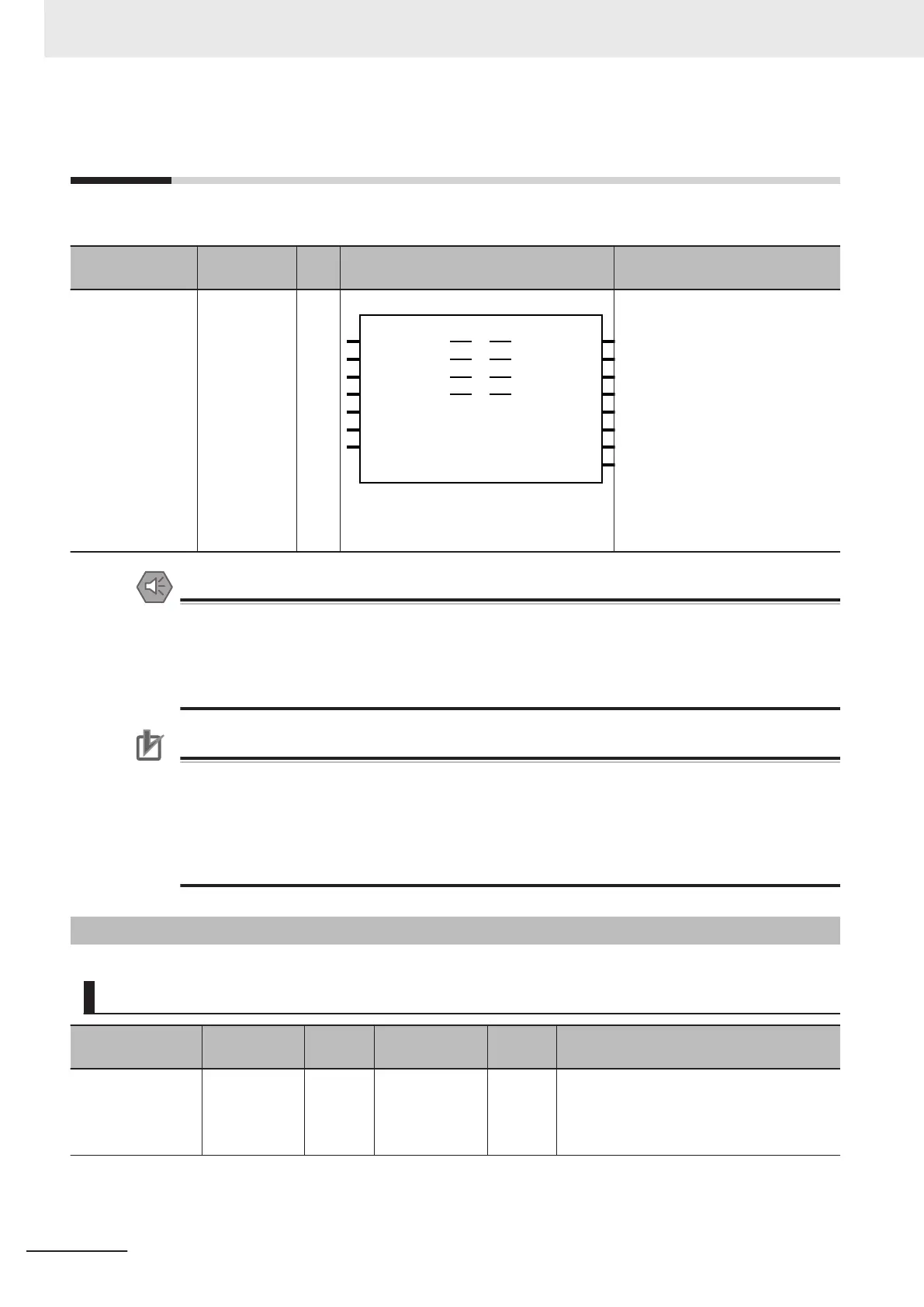
Graphic expression ST expression
MC_DigitalCamS-
witch
Enable Digital
Cam Switch
FB
MC_DigitalCamSwitch_instance
TrackOptions
Axis Axis
Switches Switches
Outputs Outputs
Enable
EnableMask
ValueSource
Busy
Error
ErrorID
MC_DigitalCamSwitch
TrackOptions
InOperation
MC_DigitalCamSwitch_instance (
Axis :=parameter,
Switches :=parameter,
Outputs :=parameter,
T
rackOptions :=parameter,
Enable :=parameter,
EnableMask :=parameter,
ValueSource :=parameter,
InOperation =>parameter,
Busy =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Precautions for Safe Use
• Always use the axis at a constant velocity for the MC_DigitalCamSwitch (Enable Digital Cam
Switch) instruction.
•
Use the NX_AryDOutTimeStamp (Write Digital Output Array with Specified Time Stamp) in-
struction only after you confirm that InOperation from the MC_DigitalCamSwitch (Enable Digi-
tal Cam Switch) instruction is TRUE.
Precautions for Correct Use
• You can use this instruction for the following Units.
a) An axis that is assigned to an NX-series Position Interface Unit.
The applicable NX Units are as follows: NX-EC0£££
and NX-ECS£££.
b) An OMRON 1S-series Servo Drive with built-in EtherCAT communications.
•
Always use this instruction together with the NX_AryDOutTimeStamp instruction and with a
Digital Output Unit that supports time stamp refreshing.
Variables
Input Variables
Name Meaning
Data
type
Valid range Default Description
Enable Enable BOOL TRUE or
F
ALSE
FALSE The instruction is executed while the value
of this variable is TRUE. The values in
Outputs will not change while the value of
this variable is FALSE.
*1
3 Axis Command Instructions
3-416
NY-series Motion Control Instructions Reference Manual (W561)