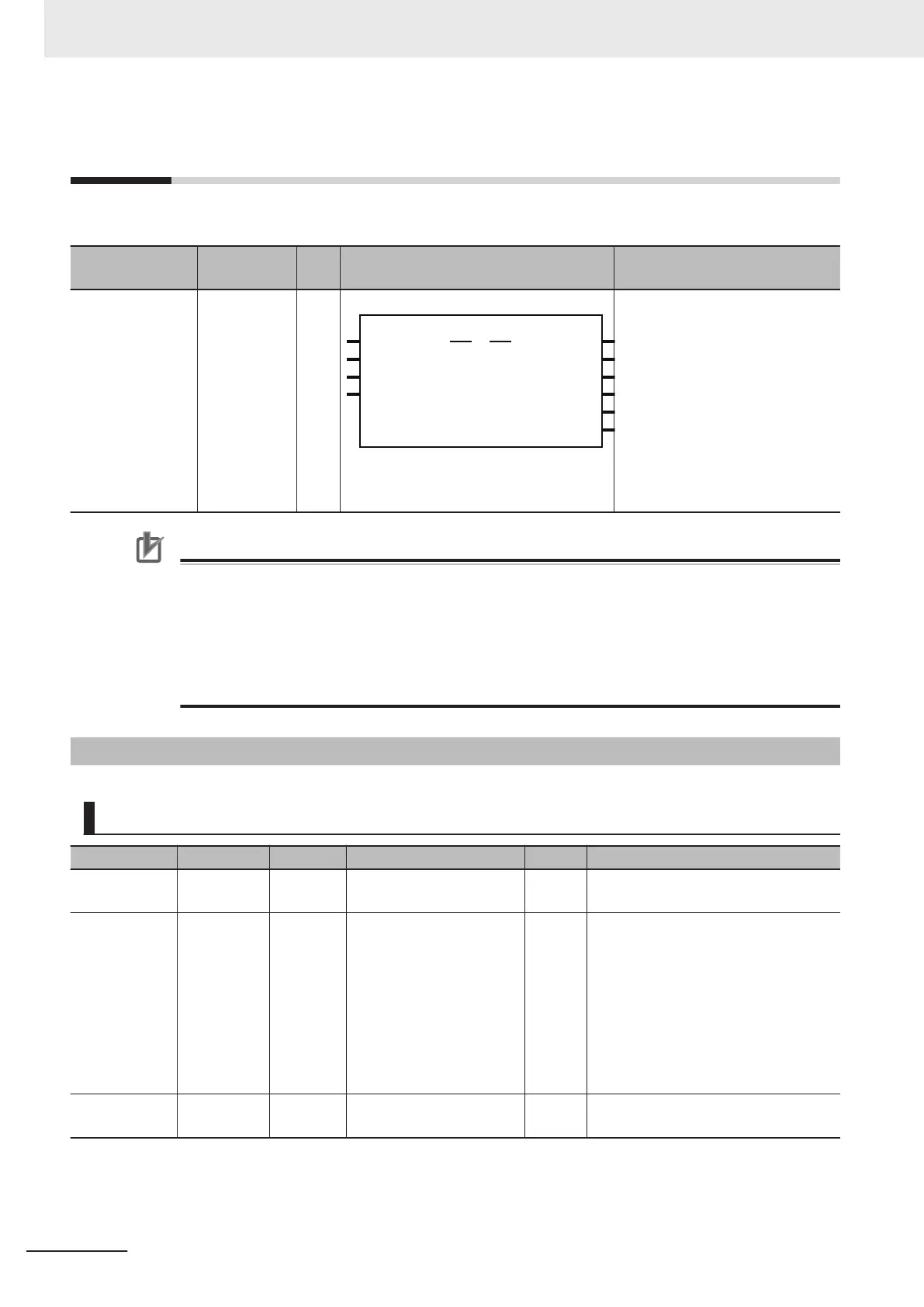
MC_TimeStampToPos
The MC_TimeStampToPos instruction calculates the position of the axis for the specified time stamp.
Instruction Name
FB/
FUN
Graphic expression ST expression
MC_TimeStamp-
T
oPos
Time Stamp
to Axis Posi-
tion Calcula-
tion
FB
MC_TimestampToPos_instance
Axis
Axis
Enable Enabled
Timestamp Busy
Error
ErrorID
MC_TimestampToPos
ValueSource CalcPosition
MC_TimeStampToPos_instance (
Axis :=parameter,
Enable :=parameter,
T
imeStamp :=parameter,
ValueSource :=parameter,
Enabled =>parameter,
Busy =>parameter,
CalcPosition =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Precautions for Correct Use
• You can use this instruction for the following Units.
a) An axis that is assigned to an NX-series Position Interface Unit.
The applicable NX Units are as follows: NX-EC0£££
and NX-ECS£££.
b) An OMRON 1S-series Servo Drive with built-in EtherCAT communications.
•
When you use this instruction for an OMRON 1S-series Servo Drive with built-in EtherCAT
communications, you must assign the Object 3211-83 hex (Present Position Time Stamp) to
a PDO.
Variables
Input Variables
Name Meaning Data type Valid range Default Description
Enable Enable BOOL TRUE or FALSE FALSE The instruction is executed while the
value of this variable is TRUE.
TimeStamp Time Stamp ULINT Non-negative number 0 Specifies the time stamp for which to
calculate the position.
A time stamp that is based on the time
in a Digital Input Unit, Encoder Input
Unit, or OMRON 1S-series Servo
Drive with built-in EtherCA
T communi-
cations that supports time stamp re-
freshing is specified. The unit is nano-
seconds.
ValueSource
(Reserved)
Input Infor-
mation
_sMC_S
OURCE
--- --- (Reserved)
3 Axis Command Instructions
3-436
NY-series Motion Control Instructions Reference Manual (W561)