MC_ZoneSwitch
The MC_ZoneSwitch instruction determines if the command current position or actual current position
of an axis is within a specified zone.
Instruction Name
FB/
FUN
Graphic expression ST expression
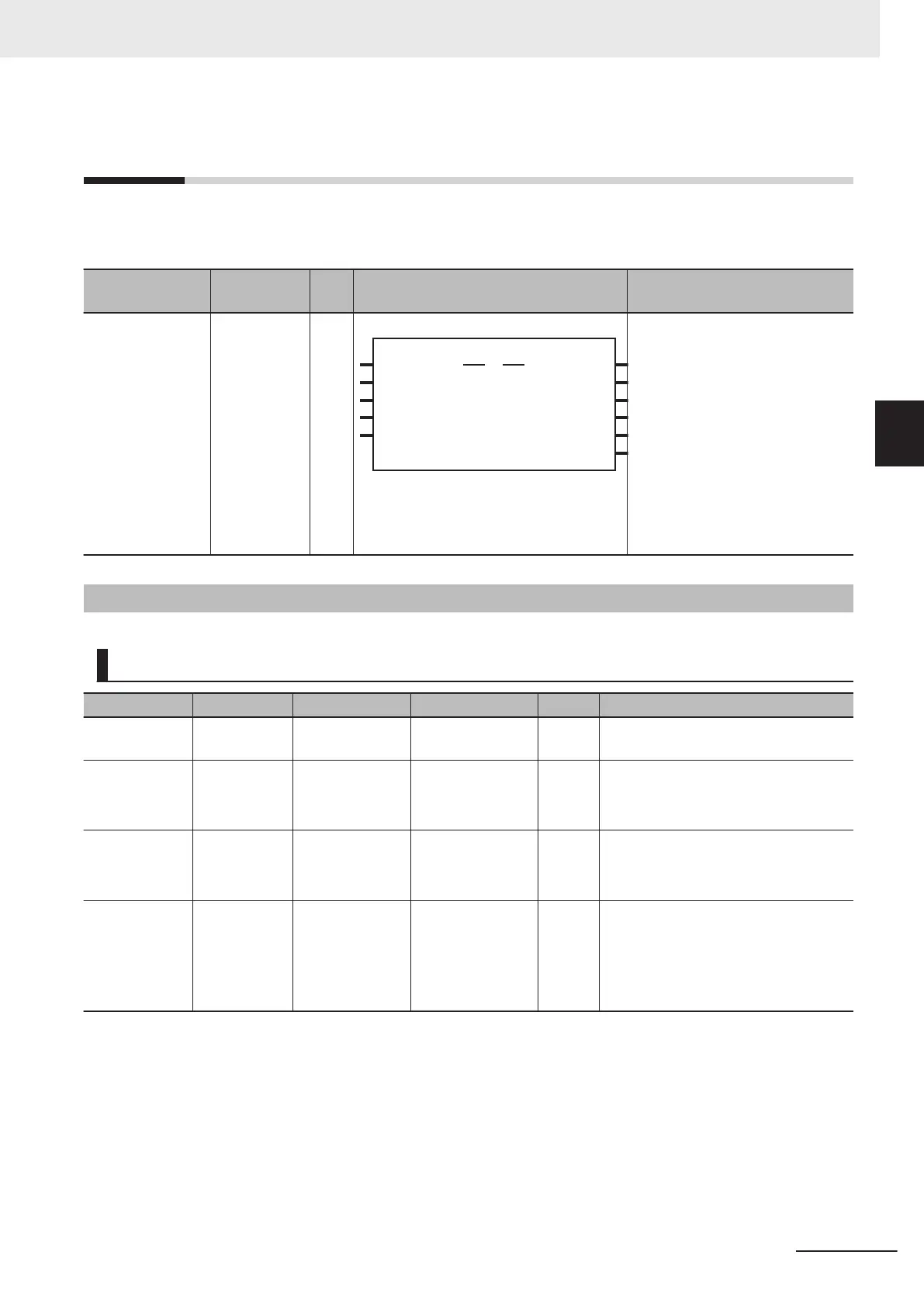
MC_ZoneSwitch Zone Monitor FB
MC_ZoneSwitch_instance
Axis
Axis
Enable Enabled
FirstPosition InZone
ReferenceType Error
ErrorID
MC_ZoneSwitch
LastPosition Busy
MC_ZoneSwitch_instance (
Axis :=parameter,
Enable :=parameter,
FirstPosition :=parameter,
LastPosition :=parameter,
ReferenceT
ype :=parameter,
Enabled =>parameter,
InZone =>parameter,
Busy =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range Default Description
Enable Enable BOOL TRUE or FALSE FALSE The instruction is executed while the
value of this variable is TRUE.
FirstPosition First Position LREAL Negative number,
positive number
,
or 0
0 Specify the first position of the zone
range.
*1
The unit is command units.
*2
LastPosition Last Position LREAL Negative number,
positive number
,
or 0
0 Specify the last position of the zone
range.
*3
The unit is command units.
*2
ReferenceType Position Type
Selection
_eMC_REFER-
ENCE_TYPE
0: _mcCommand
1: _mcFeedback
0
*4
Specify the axis information to monitor.
0: Command position (value calculated
in the previous task period
*5
)
1: Actual position (value obtained in
the same task period
*5
)
*1. Set a value that is smaller than the last position.
*2. Refer to Unit Conversion Settings in the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*3. Set a value that is larger than the first position.
*4. The default value for an enumeration variable is actually not the number, but the enumerator.
*5. The task period is the primary period.
3 Axis Command Instructions
3-355
NY-series Motion Control Instructions Reference Manual (W561)
MC_ZoneSwitch
3
Variables