• The status of the instruction or the status of the Servo Drive is output with output variables.
•
If input parameters are omitted, input variables are set to default values.
Structured Text (ST)
The instruction instance name is specified.
Instruction variables are written from upper left to lower left, then upper right to lower right.
The following example shows MC_MoveAbsolute (Absolute Positioning).
MC_ABS_instance (
Axis := MC_Axis001 ,
Execute := PTP_Absolute ,
Position := PTP_Position ,
Velocity := PTP_Velocity ,
Acceleration := PTP_Acc ,
Deceleration := PTP_Dec ,
Jerk := PTP_Jerk ,
Direction := _mcNoDirection ,
BufferMode := _mcAborting ,
Axis => MC_Axis001 ,
Done => PTP_Done
);
1-2-3
Motion Control Instruction Locations
This section describes the tasks in which motion control instructions can be located, and the differen-
ces in operation that can occur for dif
ferent locations in the user program.
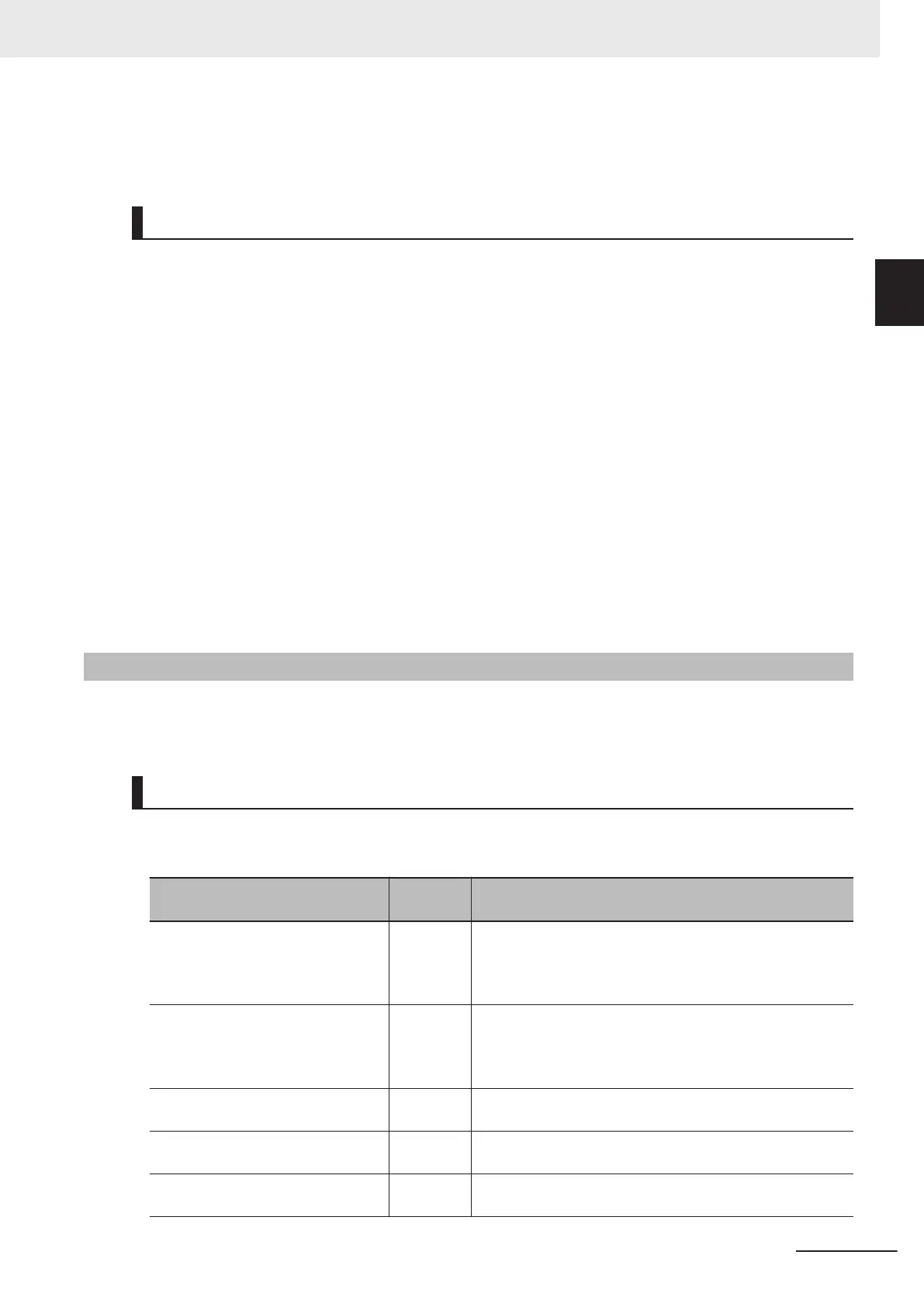
Task Types
Motion control instructions can be used in the primary periodic task, or in a priority-16 periodic task. If
you use motion control instructions in any other task, an error will occur when you build the program.
Task type
Applica-
bility
Remarks
Primary periodic task Applicable
• Common instructions for which an axis or axes group is
not specified.
• Instructions for an axis or axes group assigned to the pri-
mary periodic task
Periodic task (execution priority: 16) Applicable
• Common instructions for which an axis or axes group is
not specified.
• Instructions for an axis or axes group assigned to the pri-
mary periodic task
Periodic task (execution priority: 17) Not Appli-
cable
Periodic task (execution priority: 18) Not Appli-
cable
Event task (execution priority: 8) Not Appli-
cable
1 Introduction to Motion Control Instructions
1-9
NY-series Motion Control Instructions Reference Manual (W561)
1-2 Basic Information on Motion
Control Instructions
1
1-2-3 Motion Control Instruction Locations