MC_OffsetPosition
The MC_OffsetPosition instruction adds the specified position offset to the command current position
of the slave axis in synchronized control with an acceleration/deceleration curve applied, and outputs
the result.
Instruction Name
FB/
FUN
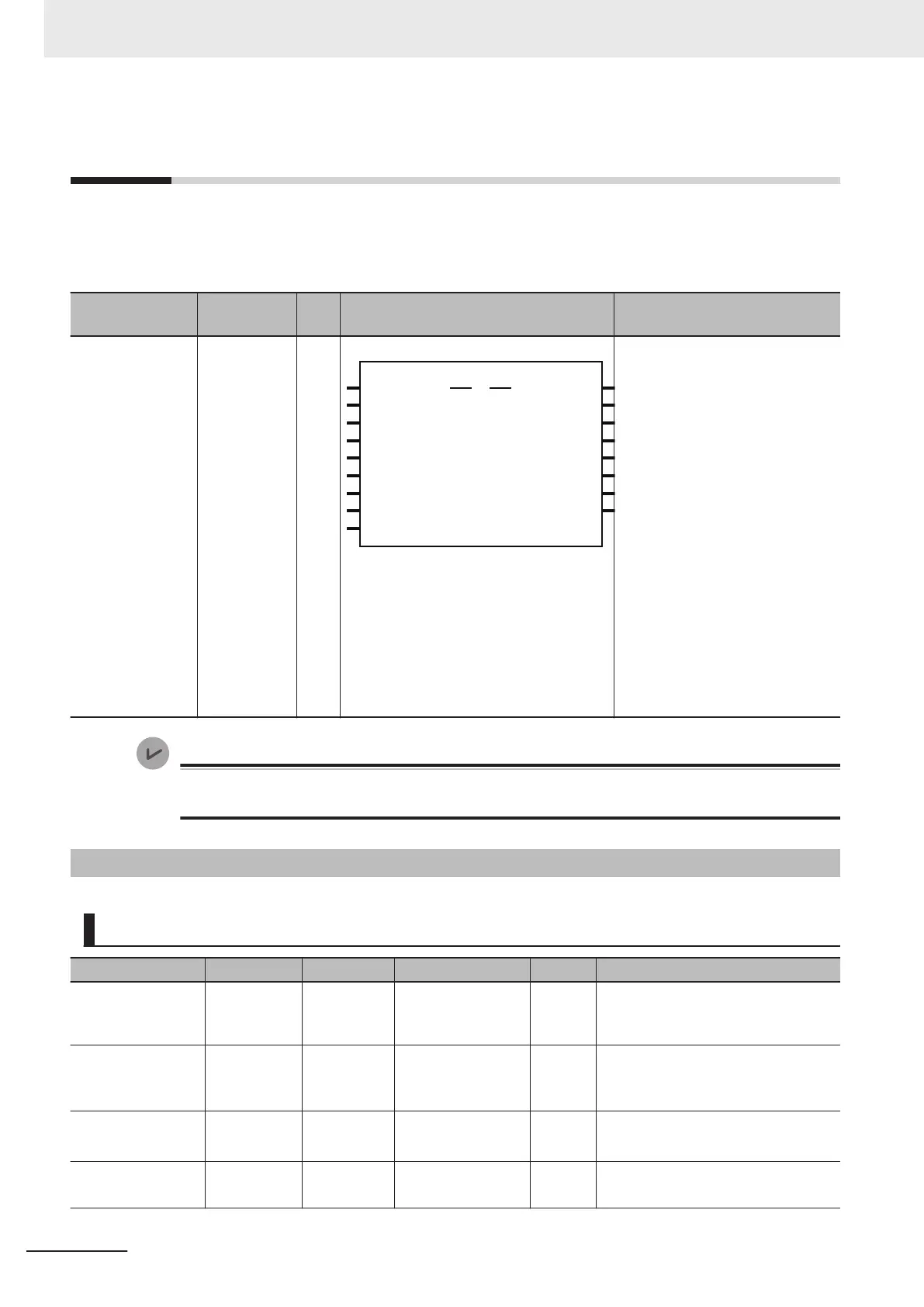
Graphic expression ST expression
MC_OffsetPosi-
tion
Position Off-
set Compen-
sation
FB
BufferMode
MoveMode
MC_Of
fsetPosition_instance
Deceleration
Active
Axis Axis
Execute Done
OutputtedOffsetPositionOffsetPosition
Busy
Acceleration
ErrorJerk
MC_OffsetPosition
Velocity
CommandAborted
ErrorID
MC_OffsetPosition_instance(
Axis :=parameter ,
Execute :=parameter,
Of
fsetPosition :=parameter,
Velocity :=parameter,
Acceleration :=parameter,
Deceleration :=parameter,
Jerk :=parameter,
BufferMode :=parameter,
MoveMode :=parameter,
Done =>parameter,
OutputtedOffsetPosition
=>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Version Information
If you use an NY-series Controller, the Controller with unit version 1.21 or later and Sysmac Stu-
dio version 1.29 or higher are required to use this instruction.
Variables
Input Variables
Name Meaning Data type Valid range Default Description
Execute Execute BOOL TRUE or FALSE FALSE The instruction is executed when the
value of this variable changes to
TRUE.
OffsetPosition Position Off-
set
LREAL Negative number,
positive number
, or
0
0 Specifies the position offset to add to
the command current position.
The unit is command units.
*1
Velocity Target veloci-
ty
LREAL Positive number 0
Specifies the target velocity.
*2
The unit is command units/s.
*1
Acceleration Acceleration
Rate
LREAL Non-negative num-
ber
0 Specifies the acceleration rate.
The unit is command units/s
2
.
*1
3 Axis Command Instructions
3-458
NY-series Motion Control Instructions Reference Manual (W561)