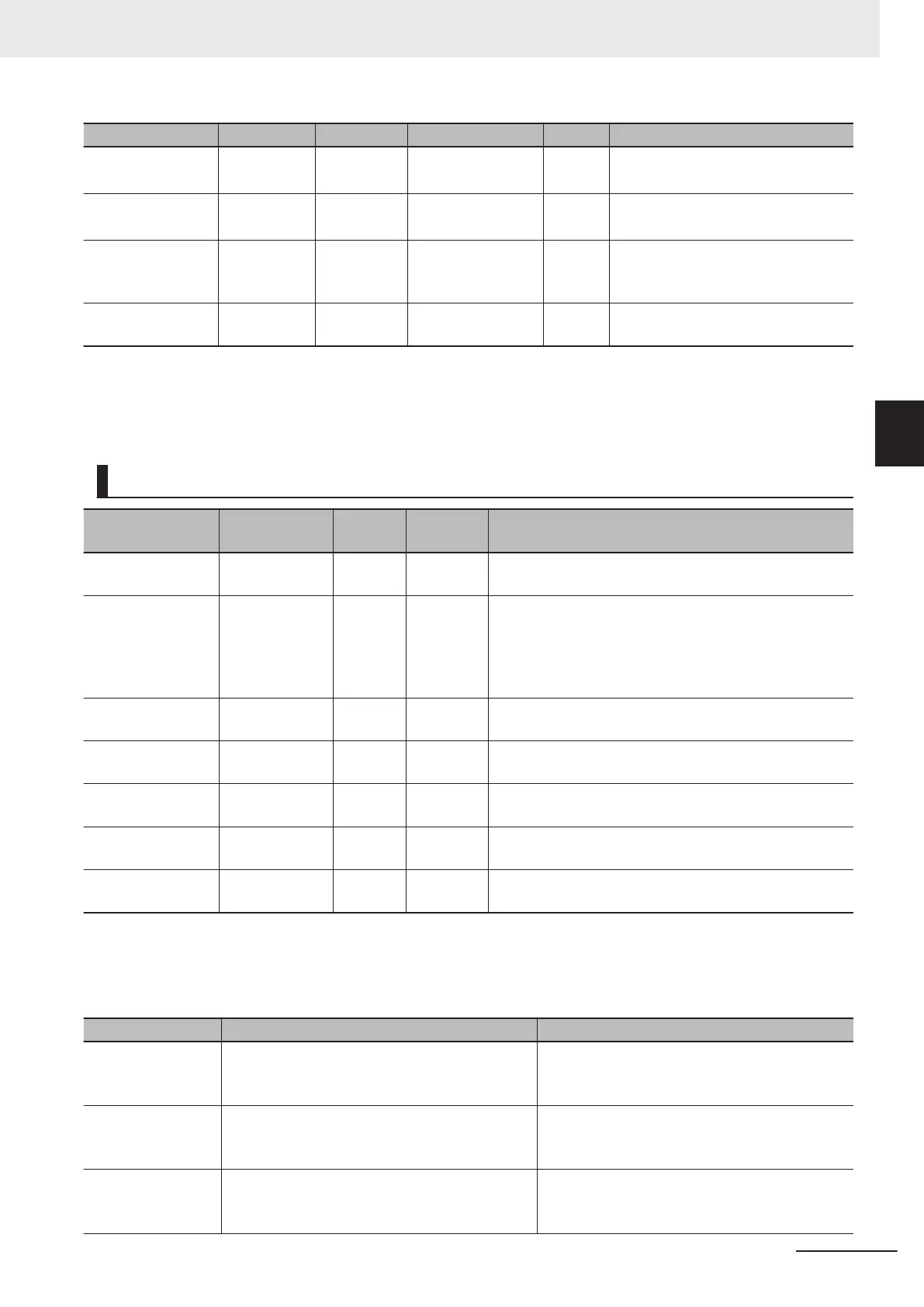
Name Meaning Data type Valid range Default Description
Deceleration Deceleration
Rate
LREAL Non-negative num-
ber
0 Specifies the deceleration rate.
The unit is command units/s
2
.
*1
Jerk
(Reserved)
Jerk LREAL 0 0 Specifies the jerk.
The unit is command units/s
3
.
*1
BufferMode
(Reserved)
Buffer Mode
Selection
_eMC_BUF-
FER_MODE
0: _mcAborting
0
*3
Specifies the behavior when execut-
ing more than one motion instruction.
0: Aborting
MoveMode Travel Mode _eMC_MOV
E_MODE
1: _mcRelative
1
*3
Selects the travel method.
1: Relative positioning
*1. Refer to Unit Conversion Settings in the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*2. Always set the target velocity. If the axis is moved without setting a target velocity, an error will occur.
*3. The default value for an enumeration variable is actually not the number, but the enumerator.
Output Variables
Name Meaning
Data
type
Valid
range
Description
Done Done BOOL TRUE or
F
ALSE
TRUE when the instruction is completed.
OutputtedOffsetPo-
sition
Position Offset
Output V
alue
LREAL Negative
number,
positive
number, or
0
Contains the position offset that was added to the com-
mand current position.
The value is updated when Active is TRUE.
Updating is stopped and the value is retained when
CommandAborted or Error is TRUE.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Active Controlling BOOL TRUE or
F
ALSE
TRUE when control is in progress.
CommandAborted Command
Aborted
BOOL TRUE or
F
ALSE
TRUE when the instruction is aborted.
Error Error BOOL TRUE or
F
ALSE
TRUE while there is an error.
ErrorID Error Code WORD
*1
Contains the error code when an error occurs.
A value of 16#0000 indicates normal execution.
*1. The upper four digits of the event code give the error code for ErrorID. Refer to the NY
-series Troubleshooting Manual
(Cat. No. W564) for the event codes.
Output Variable Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
Done When positioning is completed.
• When Execute is TRUE and changes to
F
ALSE.
• After one period when Execute is FALSE.
Busy When Execute changes to TRUE.
• When Done changes to TRUE.
• When Error changes to TRUE.
• When CommandAborted changes to TRUE.
Active When the instruction is started.
• When Done changes to TRUE.
• When Error changes to TRUE.
• When CommandAborted changes to TRUE.
3 Axis Command Instructions
3-459
NY-series Motion Control Instructions Reference Manual (W561)
MC_OffsetPosition
3
Variables