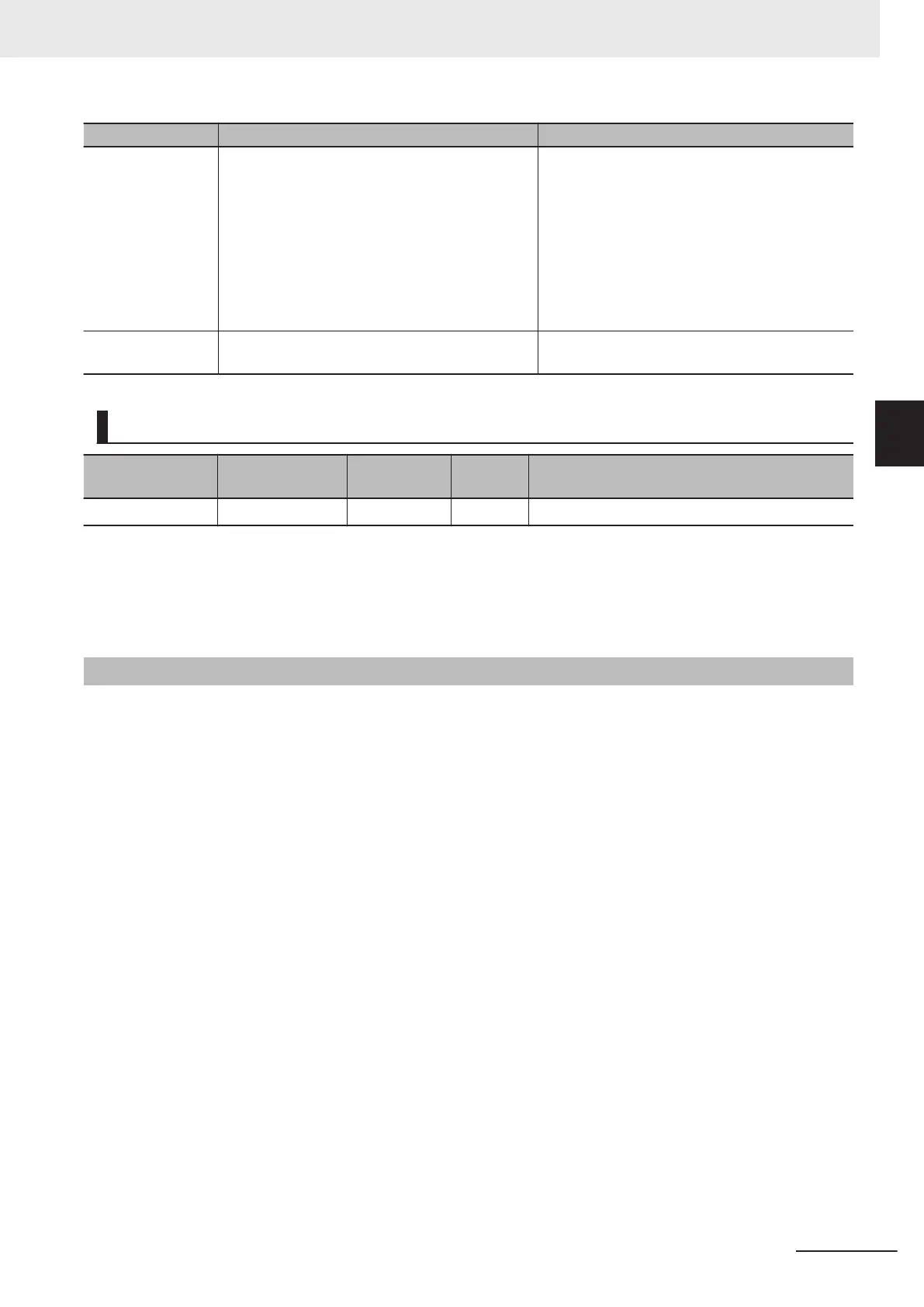
Name Timing for changing to TRUE Timing for changing to FALSE
CommandAborted
• When this instruction is aborted because an-
other motion control instruction was executed
with the Buf
fer Mode set to Aborting.
• When this instruction is canceled due to an er-
ror.
• When this instruction is executed while there is
an error.
• When you start this instruction during
MC_Stop instruction execution.
• When Execute is TRUE and changes to
FALSE.
• After one period when Execute is FALSE.
Error When there is an error in the execution condi-
tions or input parameters for the instruction.
When the error is cleared.
In-Out Variables
Name Meaning Data type
Valid
range
Description
Axis Axis _sAXIS_REF ---
Specifies the axis.
*1
*1. Specify a user-defined Axis Variable that was created in the Axis Basic Settings of the Sysmac Studio (default: MC_Ax-
is*) or a system-defined axis variable name (_MC_AX[*]).
If you use Sysmac Studio version 1.29 or higher, you can specify the system-defined axis variable name for AT specifi-
cation of a user-defined variable. This will allow you to specify the user-defined variable.
If you use Sysmac Studio version 1.28 or lower, do not specify any user-defined variable created in the variable table.
Function
• The MC_TorqueControl instruction controls the output torque of the Servomotor by directly specify-
ing the torque command value.
• Set the target torque in increments of 0.1%. If the second decimal place is specified, it will be round-
ed off.
• Use the MC_Stop instruction to stop the execution of this instruction.
• The Torque Control Mode of the Servo Drive is used to perform torque control.
• The previous Control Mode is maintained until it is changed.
Example:
Changing from position control to torque control: Position control is performed until the Servo Drive
changes to torque control.
Changing from torque control to position control: Torque control is performed until the Servo Drive
changes to position control.
Mapping Data Objects
To use the MC_TorqueControl (Torque Control) instruction, map the following object data in the
Detailed Settings Area of the Axis Basic Settings Display of the Sysmac Studio.
• Target torque (6071 hex)
• Modes of operation (6060 hex)
• Torque actual value (6077 hex)
• Modes of operation display (6061 hex)
3 Axis Command Instructions
3-337
NY-series Motion Control Instructions Reference Manual (W561)
MC_TorqueControl
3
Function