MC_MoveLink
Positioning is performed in sync with the specified master axis.
Instruction Name
FB/
FUN
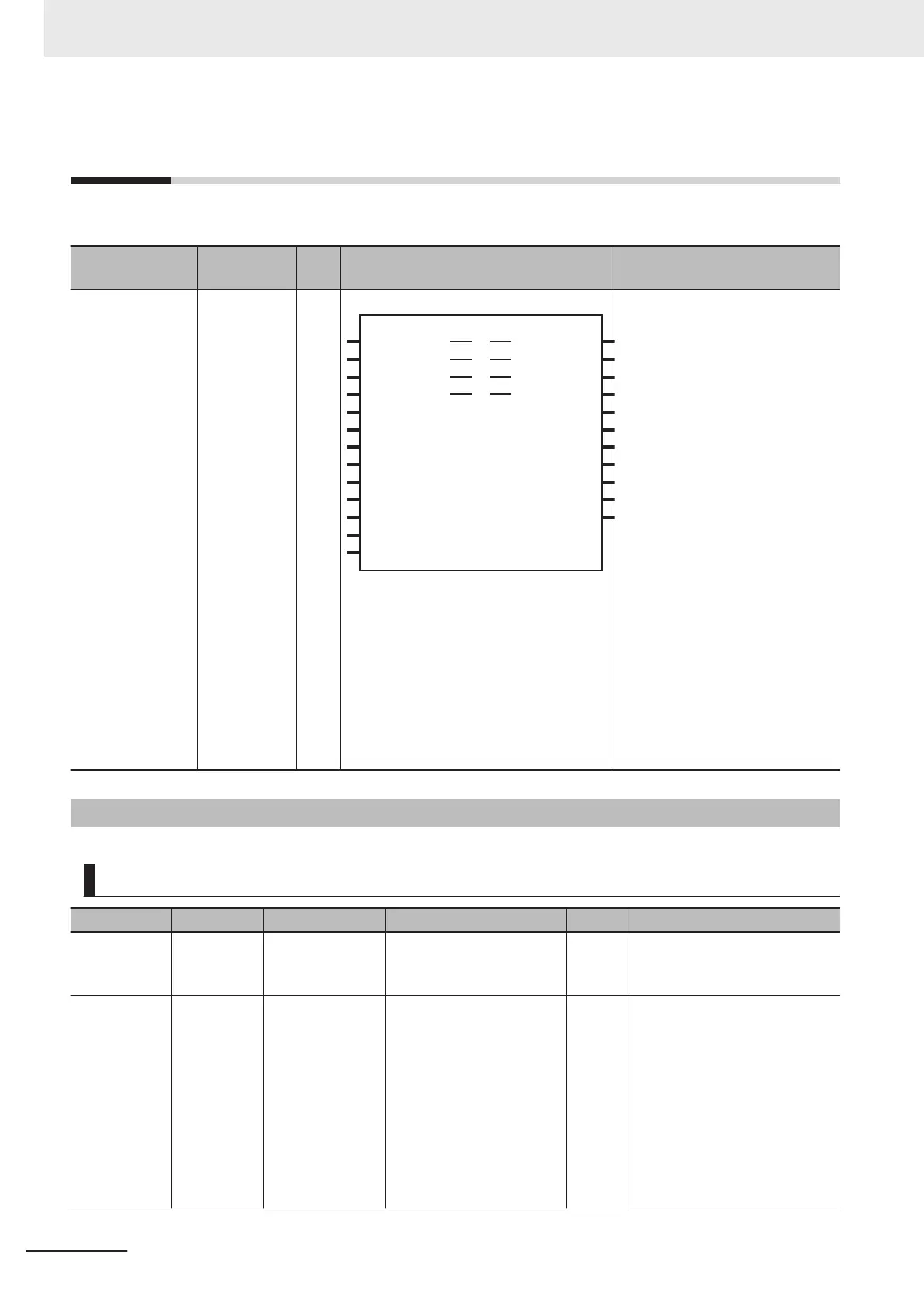
Graphic expression ST expression
MC_MoveLink Synchronous
Positioning
FB
MasterDistanceInA
CC
MasterDistanceInDEC
LinkOption
MasterStartDistance
BufferMode
MC_MoveLink_instance
ReferenceType
TriggerVariable
Master Master
Slave Slave
Tr iggerInput Tr iggerInput
Execute
InSync
Error
ErrorID
CommandAborted
SlaveDistance
ActiveMasterDistance
MC_MoveLink
TriggerVariable
Done
Busy
MC_MoveLink_instance (
Master :=parameter,
Slave :=parameter,
T
riggerInput :=parameter,
TriggerVariable :=parameter,
Execute :=parameter,
ReferenceType :=parameter,
SlaveDistance :=parameter,
MasterDistance :=parameter,
MasterDistanceI-
nACC :=parameter,
MasterDistanceIn-
DEC :=parameter,
LinkOption :=parameter,
MasterStartDistance :=parameter,
BufferMode :=parameter,
Done =>parameter,
InSync =>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range Default Description
Execute Execute BOOL TRUE or FALSE FALSE The instruction is executed
when the value of this variable
changes to TRUE.
Reference-
T
ype
*1
Position
Type Selec-
tion
_eMC_REFER-
ENCE_TYPE
0: _mcCommand
1: _mcFeedback
2: _mcLatestCommand
0
*2
Specify the position type.
0: Command position (value
calculated in the previous task
period
*3
)
1: Actual position (value ob-
tained in the same task period
*3
)
2: Command position (value
calculated in the same task pe-
riod
*3
)
3 Axis Command Instructions
3-294
NY-series Motion Control Instructions Reference Manual (W561)