If you use Sysmac Studio version 1.29 or higher, you can specify the system-defined axis variable name for AT specifi-
cation of a user-defined variable. This will allow you to specify the user-defined variable.
If you use Sysmac Studio version 1.28 or lower
, do not specify any user-defined variable created in the variable table.
Function
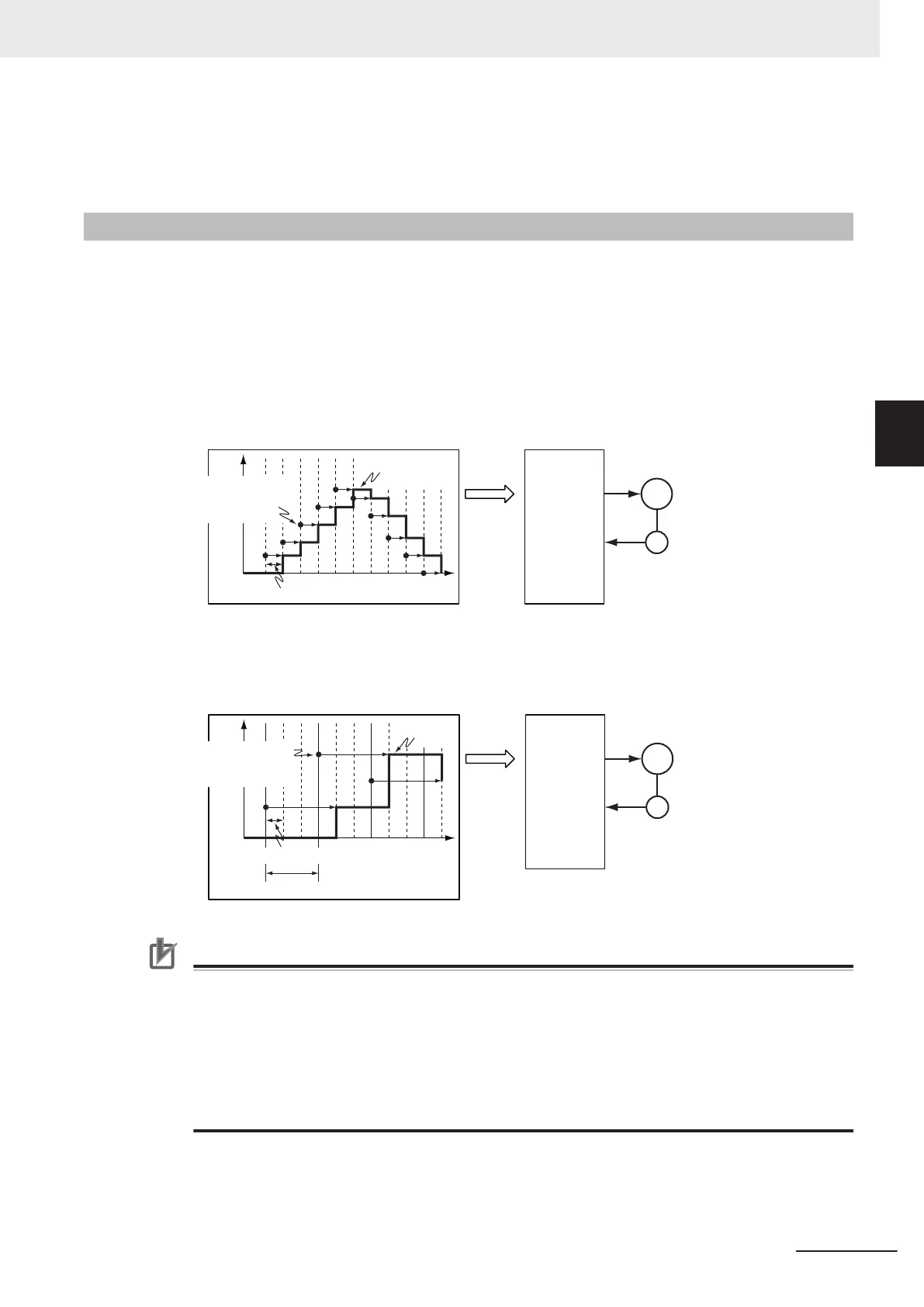
• The MC_SyncMoveAbsolute instruction outputs the target position from the user program every task
period to the Servo Drive or other device in Cyclic Synchronous Position (CSP) Control Mode. The
target position is given as an absolute position.
•
The upper limit of the velocity is the value that is set in the Maximum Velocity axis parameter.
Maximum Acceleration and Maximum Deceleration are not used.
• If this instruction is executed in the primary periodic task, the target position that is specified in the
input parameters is output to the Servo Drive in the next task period.
M
E
MC_SyncMoveAbsolute Executed in Primary Periodic Task
Command
position
Time
Primary period
Command
position
Position
Servo
Drive
Target positions (black
dots) specified with the
input parameters
• If this instruction is executed in the priority-16 periodic task, the target position that is specified in the
input parameters is output to the Servo Drive in the next periodic task.
M
E
MC_SyncMoveAbsolute Executed in Priority-16 Periodic Task
Command
position
Time
Primary period
Command
position
Position
Servo
Drive
Task period
Target positions (black
dots) specified with
the input parameters
Precautions for Correct Use
Specify the target position so that the travel distance to the target position does not cause the
velocity to exceed the value that is specified in the Maximum Velocity axis parameter. If a tar-
get position is specified that cause the Maximum Velocity to be exceeded, the command ve-
locity will become saturated and the travel distance will be output so that the Maximum
Velocity is not exceeded. If this occurs, any insufficient travel distance to the target position is
output in the next period or later.
Details.VelLimit (Command Velocity Saturation) in the axis control status changes to TRUE at
this time.
3 Axis Command Instructions
3-403
NY-series Motion Control Instructions Reference Manual (W561)
MC_SyncMoveAbsolute
3
Function