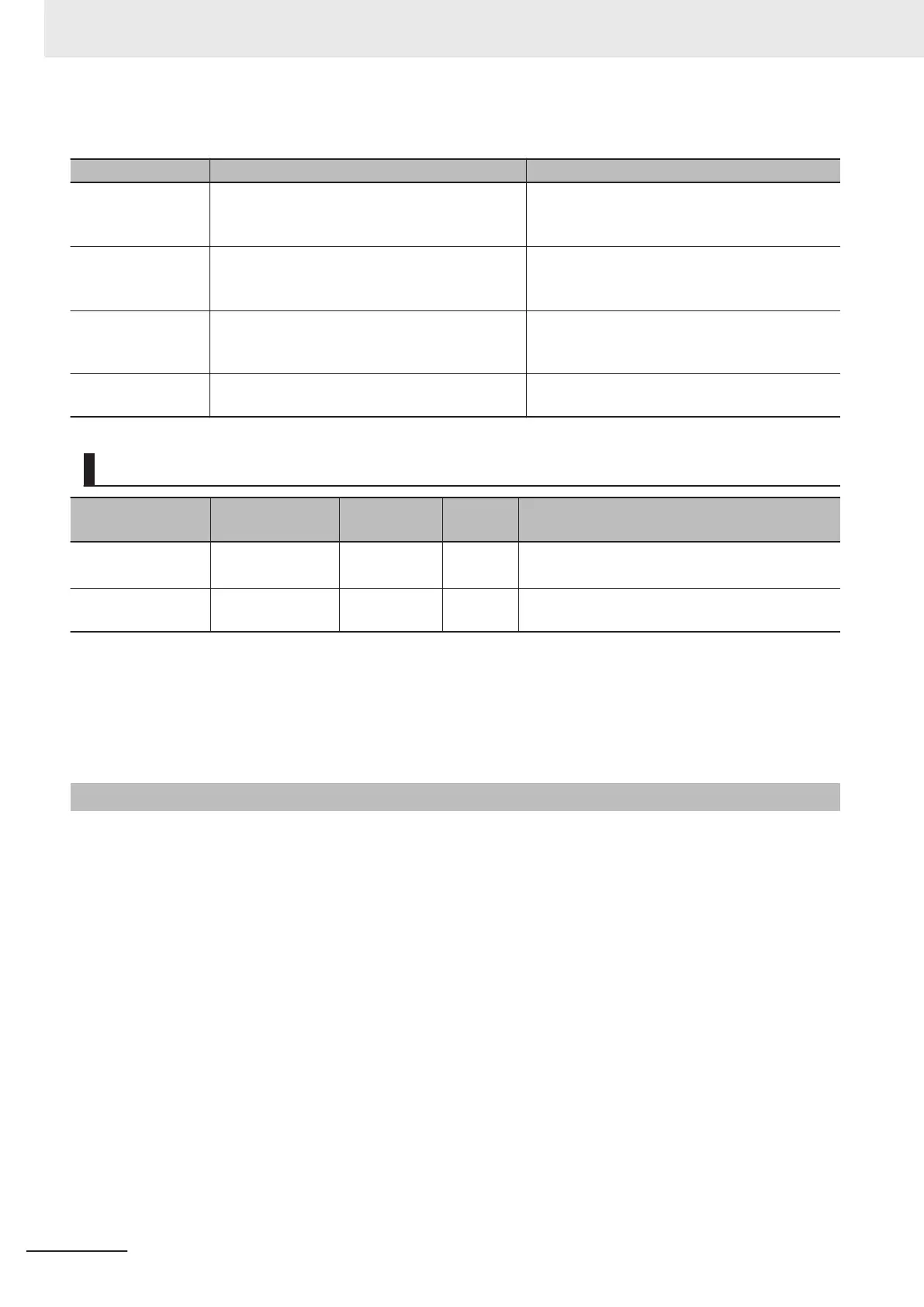
Output Variable Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
Done When the instruction is completed.
• When Execute is TRUE and changes to
F
ALSE.
• After one period when Execute is FALSE.
Busy When Execute changes to TRUE.
• When Done changes to TRUE.
• When Error changes to TRUE.
• When CommandAborted changes to TRUE.
CommandAborted When this instruction is canceled due to an error.
• When Execute is TRUE and changes to
FALSE.
• After one period when Execute is FALSE.
Error When there is an error in the execution condi-
tions or input parameters for the instruction.
When the error is cleared.
In-Out Variables
Name Meaning Data type
Valid
range
Description
Axis Axis _sAXIS_REF --- Specify the axis for which to write the parameters.
*1
AxisParameter Axis Parameters _sAXIS_PAR-
AM
---
Specify the values to write.
*2
*1. Specify a user-defined Axis Variable that was created in the Axis Basic Settings of the Sysmac Studio (default: MC_Ax-
is*) or a system-defined axis variable name (_MC_AX[*]).
If you use Sysmac Studio version 1.29 or higher
, you can specify the system-defined axis variable name for AT specifi-
cation of a user-defined variable. This will allow you to specify the user-defined variable.
If you use Sysmac Studio version 1.28 or lower, do not specify any user-defined variable created in the variable table.
*2. Define a user-defined variable with a data type of _sAXIS_PARAM.
Function
• When Execute changes to TRUE, the MC_W
riteAxisParameter instruction writes the values speci-
fied in AxisParameter (Axis Parameters) to the axis parameters for the axis specified with Axis.
• You can write data only when the specified axis is an unused axis. If the instruction is executed for
any other condition, an execution error occurs and the axis parameters are not written. The values
before the instruction was executed will be held.
• If you execute this instruction after you change axis usage with the MC_ChangeAxisUse instruction,
make sure that the Done output variable from the MC_ChangeAxisUse instruction is TRUE before
you execute this instruction.
• If there is an illegal value in AxisParameter (Axis Parameters) or if there is an inconsistency within
the axis parameters, an execution error occurs and the axis parameters are not written. The values
before the instruction was executed will be held.
For information on the setting ranges of the axis parameters or the consistency check within the axis
parameters, refer to the NY-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559).
5 Common Command Instructions
5-48
NY-series Motion Control Instructions Reference Manual (W561)