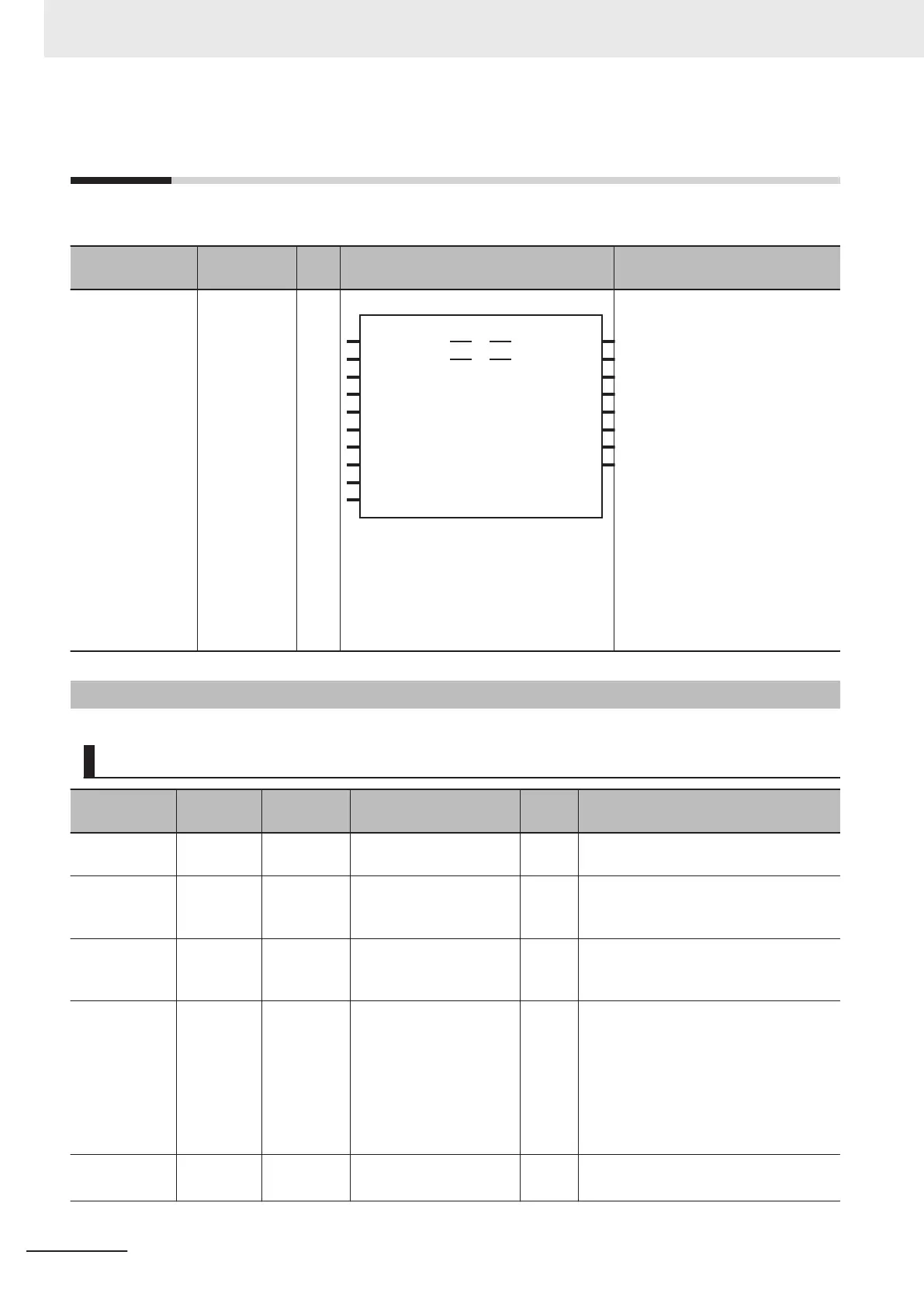
MC_GearIn
Specifies the gear ratio between the master axis and the slave axis and starts gear operation.
Instruction Name
FB/
FUN
Graphic expression ST expression
MC_GearIn Start Gear
Operation
FB
Jer
k
BufferMode
MC_GearIn_instance
ReferenceType
Master Master
Slave Slave
Execute InGear
RatioDenominator
Error
ErrorID
CommandAborted
Acceleration
Active
Deceleration
MC_GearIn
RatioNumerator Busy
MC_GearIn_instance (
Master :=parameter,
Slave :=parameter,
Execute :=parameter,
RatioNumerator :=parameter,
RatioDenominator :=parameter,
ReferenceT
ype :=parameter,
Acceleration :=parameter,
Deceleration :=parameter,
Jerk :=parameter,
BufferMode :=parameter,
InGear =>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALSE The instruction is executed when the
value of this variable changes to TRUE.
RatioNumera-
tor
Gear Ratio
Numerator
DINT Positive or negative
number
10,000 Specify the numerator of the electronic
gear ratio between the master and
slave axes.
RatioDenomi-
nator
Gear Ratio
Denomina-
tor
UDINT Positive number 10,000 Specify the denominator of the electron-
ic gear ratio between the master and
slave axes.
Reference-
T
ype
*1
Position
Type Se-
lection
_eMC_REF
ERENCE_T
YPE
0: _mcCommand
1: _mcFeedback
2: _mcLatestCommand
0
*2
Specify the position type.
0: Command position (value calculated
in the previous task period
*3
)
1: Actual position (value obtained in the
same task period
*3
)
2: Command position (value calculated
in the same task period
*3
)
Acceleration Accelera-
tion Rate
LREAL Non-negative number 0 Specify the acceleration rate.
The unit is command units/s
2
.
*4
3 Axis Command Instructions
3-246
NY-series Motion Control Instructions Reference Manual (W561)