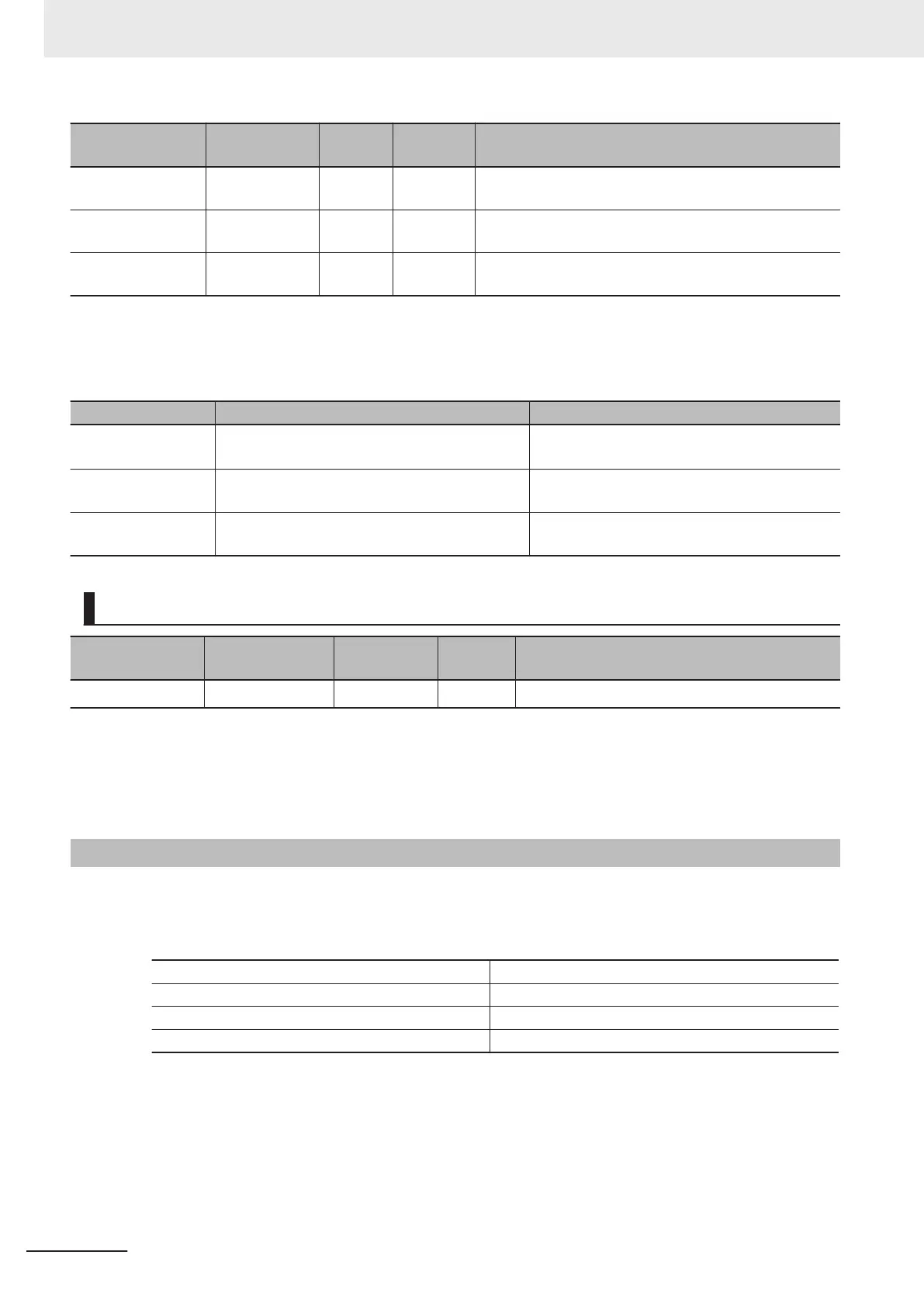
Name Meaning
Data
type
Valid
range
Description
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Error Error BOOL TRUE or
F
ALSE
TRUE while there is an error.
ErrorID Error Code WORD
*1
Contains the error code when an error occurs.
A value of 16#0000 indicates normal execution.
*1. The upper four digits of the event code give the error code for ErrorID. Refer to the NY
-series Troubleshooting Manual
(Cat. No. W564) for the event codes.
Output Variable Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
Enabled When Enable changes to TRUE.
• After one period when Enable is FALSE.
• When Error changes to TRUE.
Busy When Enable changes to TRUE.
• When Enable changes to F
ALSE.
• When Error changes to TRUE.
Error When there is an error in the execution condi-
tions or input parameters for the instruction.
When the error is cleared.
In-Out Variables
Name Meaning Data type
Valid
range
Description
Axis Axis _sAXIS_REF ---
Specifies the axis.
*1
*1. Specify a user-defined Axis Variable that was created in the Axis Basic Settings of the Sysmac Studio (default: MC_Ax-
is*) or a system-defined axis variable name (_MC_AX[*]).
If you use Sysmac Studio version 1.29 or higher, you can specify the system-defined axis variable name for AT specifi-
cation of a user-defined variable. This will allow you to specify the user-defined variable.
If you use Sysmac Studio version 1.28 or lower, do not specify any user-defined variable created in the variable table.
Function
• The MC_SetOverride instruction changes override factors related to the target velocity of the axis.
Changes the target velocity of the axes in operation by changing the override.
•
The override factors apply only to the following instructions.
MC_Move (Positioning) instruction MC_MoveJog (Jog) instruction
MC_MoveAbsolute (Absolute Positioning) instruction MC_MoveFeed (Interrupt Feeding) instruction
MC_MoveRelative (Relative Positioning) instruction MC_MoveZeroPosition (High-speed Home) instruction
MC_MoveVelocity (Velocity Control) instruction
• The new target velocity is found with the following equation.
The target velocity after the change = T
arget velocity of the current instruction × Override factor
• The unit for override factors is %. A setting of 100 indicates 100%.
• If the target velocity that results from the override exceeds the Maximum Velocity set in the axis
parameters, the maximum velocity is used.
• The axis will accelerate or decelerate to the target velocity that results from the override.
3 Axis Command Instructions
3-162
NY-series Motion Control Instructions Reference Manual (W561)