MC_SetOverride
The MC_SetOverride instruction changes the target velocity for an axis.
Instruction Name
FB/
FUN
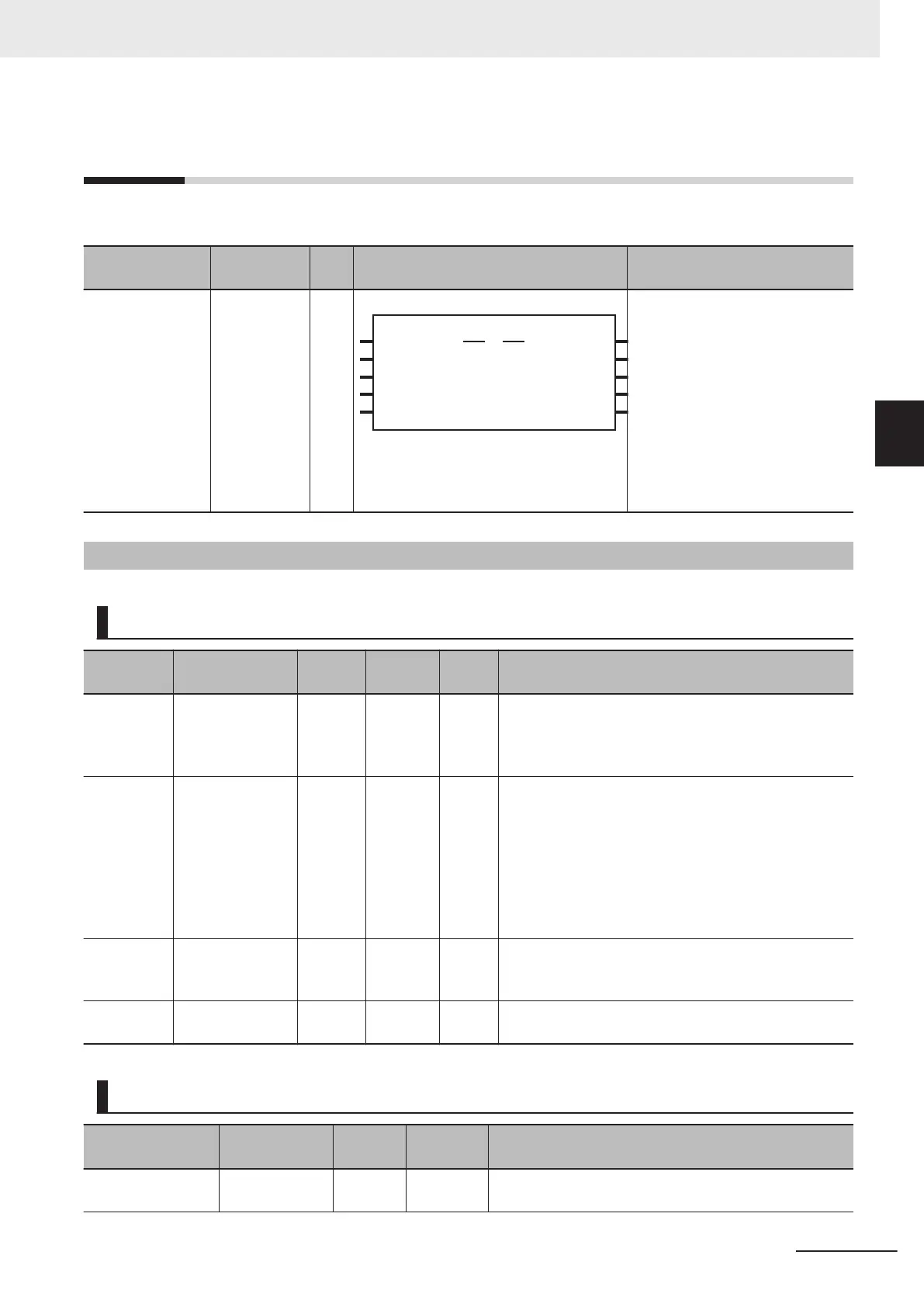
Graphic expression ST expression
MC_SetOverride Set Override
Factors
FB
MC_SetOverrid
e_instance
Axis Axis
Enable Enabled
VelFactor
JerkFactor
Error
ErrorID
MC_SetOverride
AccFactor
Busy
MC_SetOverride_instance (
Axis :=parameter,
Enable :=parameter,
V
elFactor :=parameter,
AccFactor :=parameter,
JerkFactor :=parameter,
Enabled =>parameter,
Busy =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning
Data
type
Valid
range
De-
fault
Description
Enable Enable BOOL TRUE or
FALSE
FALSE The override factors are enabled when the value of this
variable is TRUE.
The override factors return to 100% when the value of
this variable changes to FALSE.
VelFactor Velocity Override
Factor
LREAL 0 to 500 100 Specify the velocity override factor.
The valid range of the override factors is between 0.01
and 500.00.
V
alues above 500.00 are treated as 500 and values
less then 0.01 (including negative values) are treated
as 0.01.
The override factor will be 0 only when 0 is specified.
The unit is %.
AccFactor
(Reserved)
Acceleration/
Deceleration
Override Factor
LREAL 0 to 500 100 (Reserved)
JerkFactor
(Reserved)
Jerk Override
Factor
LREAL 0 to 500 100 (Reserved)
Output Variables
Name Meaning
Data
type
Valid
range
Description
Enabled Enabled BOOL TRUE or
F
ALSE
TRUE when the axis is being controlled.
3 Axis Command Instructions
3-161
NY-series Motion Control Instructions Reference Manual (W561)
MC_SetOverride
3
Variables