MC_Stop
The MC_Stop instruction decelerates an axis to a stop.
Instruction Name
FB/
FUN
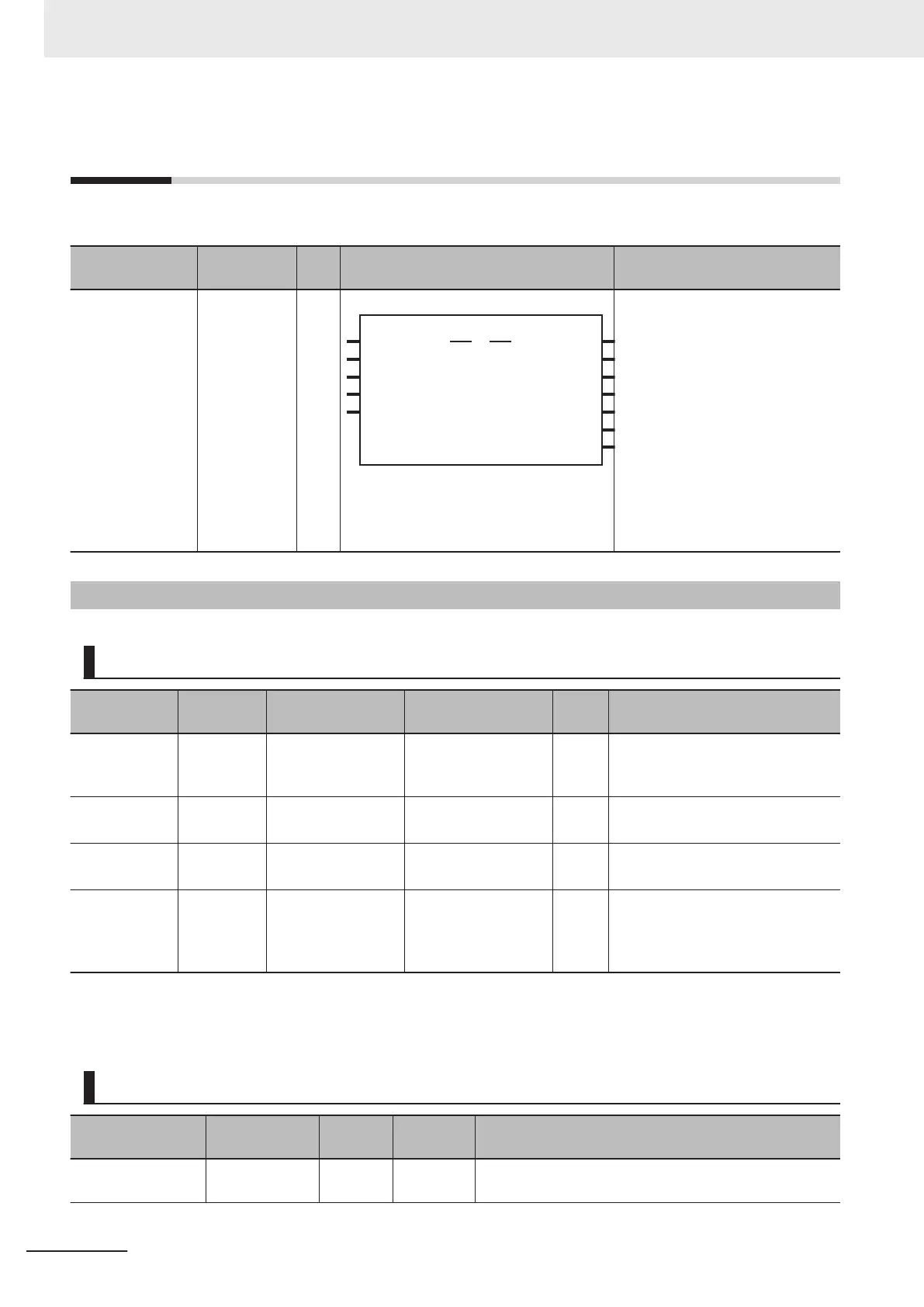
Graphic expression ST expression
MC_Stop Stop FB
MC_Stop_instance
Axis Axis
Execute Done
Deceleration
BufferMode
Error
ErrorID
CommandAborted
Active
MC_Stop
Jerk
Busy
MC_Stop_instance (
Axis :=parameter,
Execute :=parameter,
Deceleration :=parameter,
Jerk :=parameter,
Buf
ferMode :=parameter,
Done =>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALS
E
The instruction is executed when
the value of this variable changes
to TRUE.
Deceleration Decelera-
tion Rate
LREAL Non-negative number 0 Specify the deceleration rate.
The unit is command units/s
2
.
*1
Jerk Jerk LREAL Non-negative number 0 Specify the jerk.
The unit is command units/s
3
.
*1
BufferMode Buffer
Mode Se-
lection
_eMC_BUF-
FER_MODE
0: _mcAborting
0
*2
Specify the behavior when execut-
ing more than one motion instruc-
tion.
0: Aborting
*1. Refer to Unit Conversion Settings in the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*2. The default value for an enumeration variable is actually not the number, but the enumerator.
Output Variables
Name Meaning
Data
type
Valid
range
Description
Done Done BOOL TRUE or
FALSE
TRUE when the instruction is completed.
3 Axis Command Instructions
3-140
NY-series Motion Control Instructions Reference Manual (W561)