MC_MoveLinearAbsolute
The MC_MoveLinearAbsolute instruction performs linear interpolation for a specified absolute position.
Instruction Name
FB/
FUN
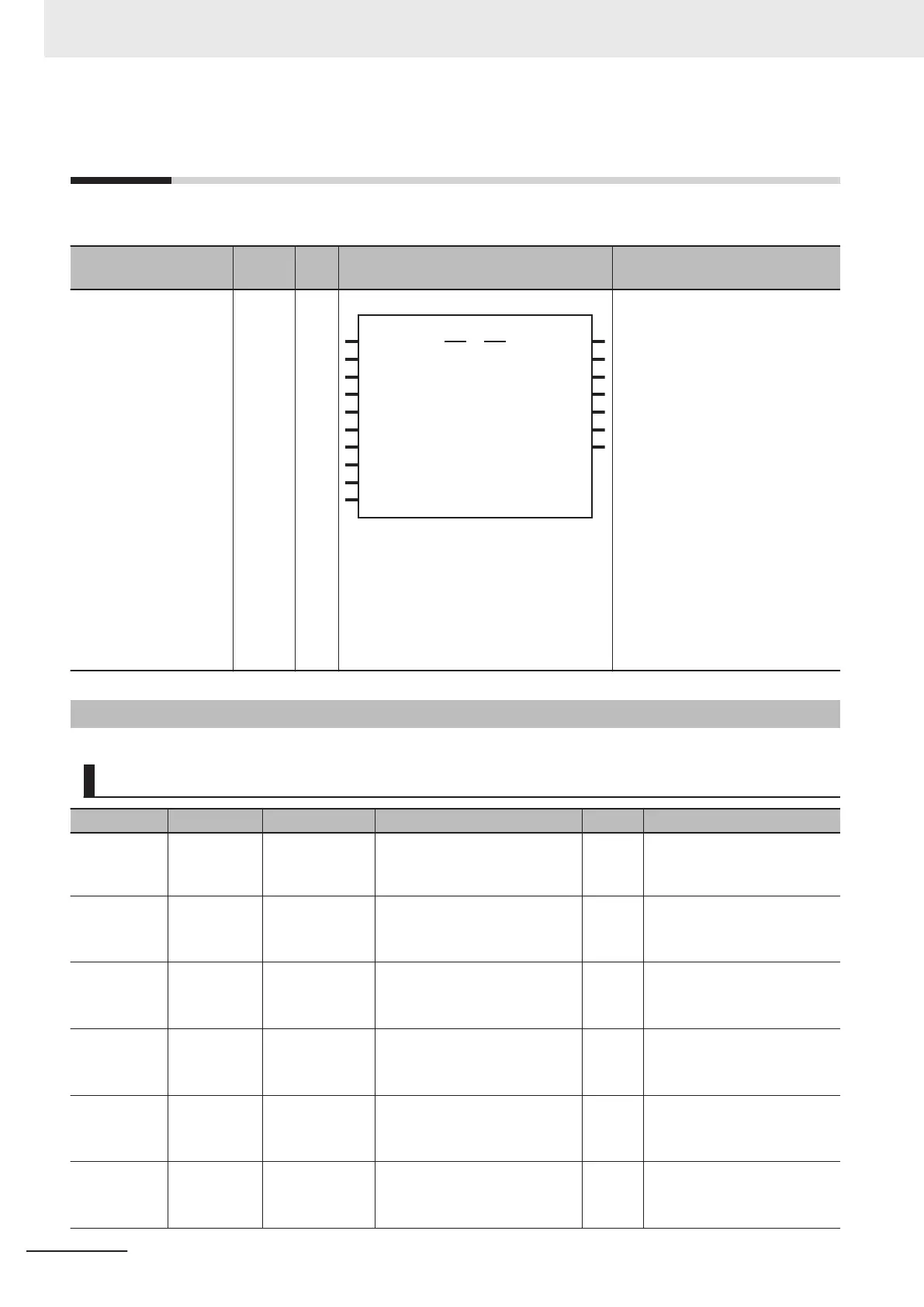
Graphic expression ST expression
MC_MoveLinearAbso-
lute
Abso-
lute
Linear
Interpo-
lation
FB
BufferMode
Tra
nsitionMode
Acceleration
MC_MoveLinearAbsolute_instance
Deceleration
AxesGroup AxesGroup
Position
Execute
Error
ErrorID
CommandAborted
Jerk
Active
CoordSystem
MC_MoveLinearAbsolute
Velocity
Done
Busy
MC_MoveLinearAbsolute_in-
stance (
AxesGroup :=parameter,
Execute :=parameter,
Position :=parameter,
V
elocity :=parameter,
Acceleration :=parameter,
Deceleration :=parameter,
Jerk :=parameter,
CoordSystem :=parameter,
BufferMode :=parameter,
TransitionMode :=parameter,
Done =>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range Default Description
Execute Execute BOOL TRUE or FALSE FALSE The instruction is executed
when the value of this varia-
ble changes to TRUE.
Position Target Posi-
tion
ARRAY [0..3]
OF LREAL
Negative number, positive
number
, or 0
0 Specify the target position for
linear interpolation.
The unit is command units.
*1
Velocity
*2
Target Ve-
locity
LREAL Positive number 0 Specify the target velocity.
The unit is command units/s.
*1
Acceleration Acceleration
Rate
LREAL Non-negative number 0 Specify the acceleration rate.
The unit is command
units/s
2
.
*1
Deceleration Deceleration
Rate
LREAL Non-negative number 0 Specify the deceleration rate.
The unit is command
units/s
2
.
*1
Jerk Jerk LREAL Non-negative number 0 Specify the jerk.
The unit is command
units/s
3
.
*1
4 Axes Group Instructions
4-40
NY-series Motion Control Instructions Reference Manual (W561)