MC_ImmediateStop
The MC_ImmediateStop instruction stops an axis according to the stopping mode that is set with the
StopMode (Stopping Mode Selection) input variable regardless of the status of the axis.
Instruction Name
FB/
FUN
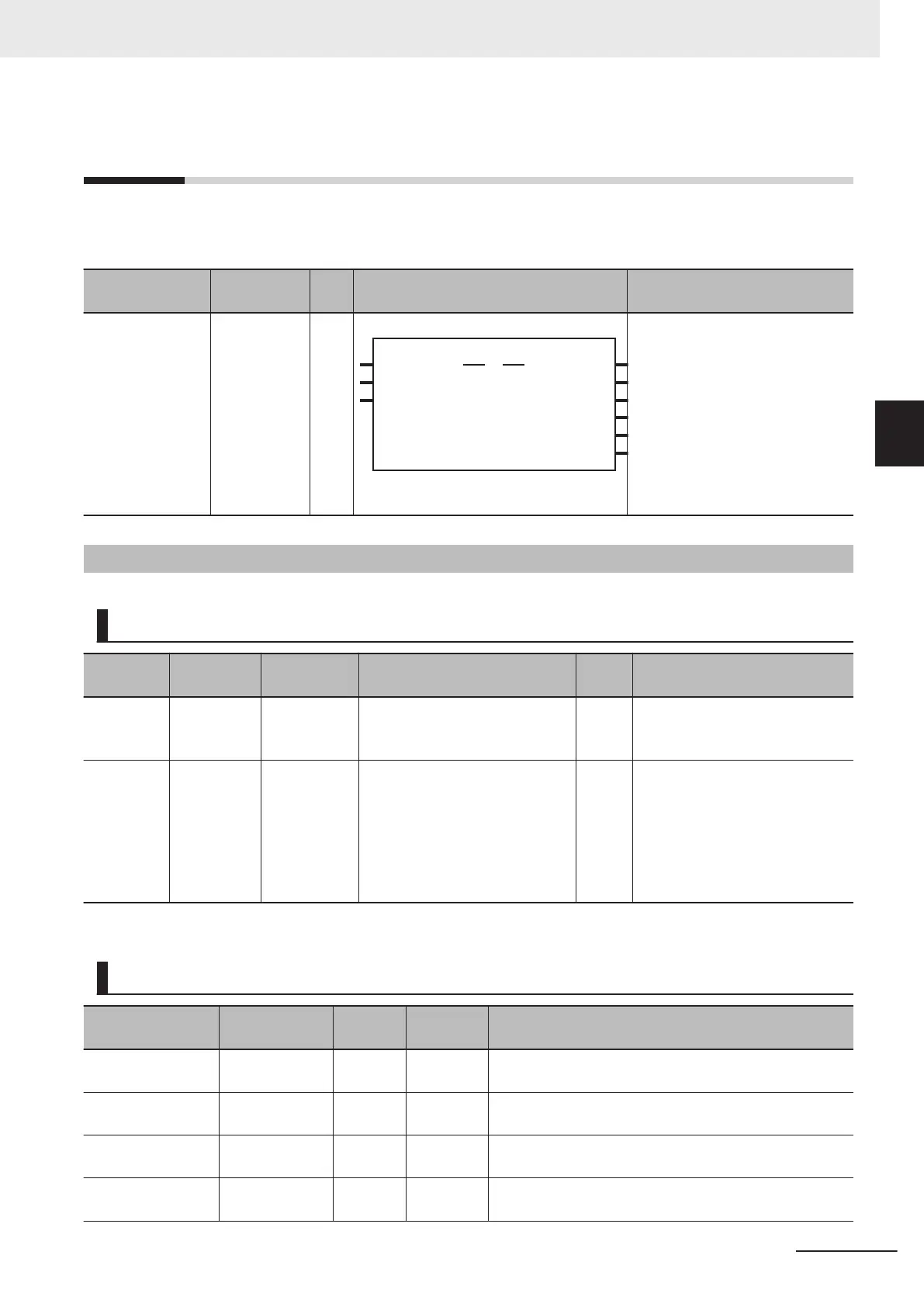
Graphic expression ST expression
MC_Immediate-
Stop
Immediate
Stop
FB
MC_ImmediateStop_i
nstance
Axis Axis
Execute
StopMode
Error
ErrorID
CommandAborted
MC_ImmediateStop
Done
Busy
MC_ImmediateStop_instance (
Axis :=parameter,
Execute :=parameter,
StopMode :=parameter,
Done =>parameter,
Busy =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALS
E
The instruction is executed when
the value of this variable changes
to TRUE.
StopMode Stopping
Mode Selec-
tion
_eMC_STOP
_MODE
1: _mcImmediateStop
2: _mcImmediateStopFEReset
3: _mcFreeRunStop
1
*1
Select the stopping mode.
1: Perform an immediate stop.
2: Perform an immediate stop
and reset the following error
counter
.
3: Perform an immediate stop
and turn OFF the Servo.
*1. The default value for an enumeration variable is actually not the number, but the enumerator.
Output Variables
Name Meaning
Data
type
Valid
range
Description
Done Done BOOL TRUE or
F
ALSE
TRUE when the instruction is completed.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
CommandAborted Command
Aborted
BOOL TRUE or
F
ALSE
TRUE when the instruction is aborted.
Error Error BOOL TRUE or
F
ALSE
TRUE while there is an error.
3 Axis Command Instructions
3-149
NY-series Motion Control Instructions Reference Manual (W561)
MC_ImmediateStop
3
Variables