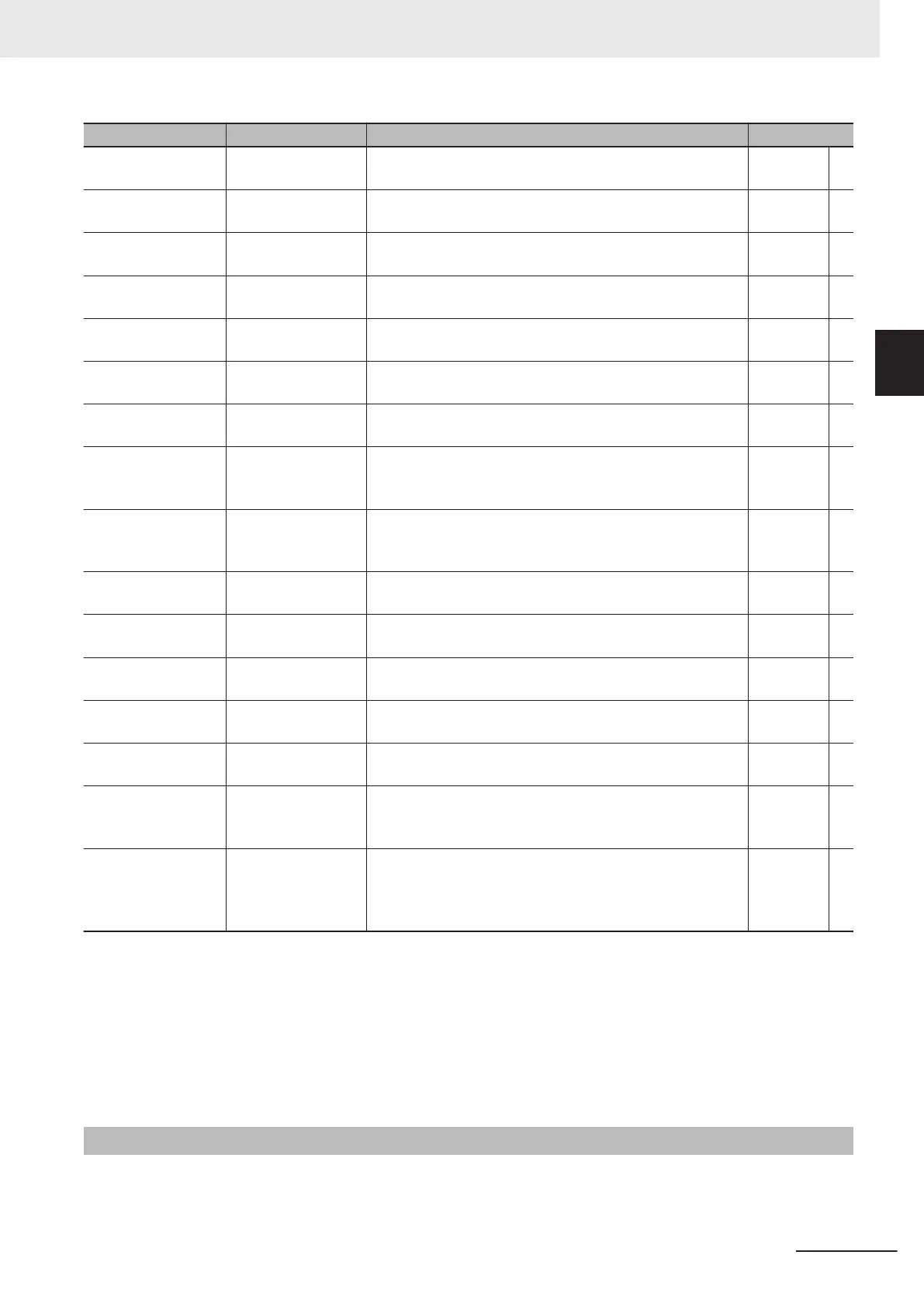
Instruction Instruction name Outline Classification
MC_CombineAxes Combine Axes Outputs the sum or difference of the command positions of
two axes as the command position.
Motion O
MC_Phasing Shift Master Axis
Phase
Shifts the phase of the master axis currently in synchron-
ized control.
Motion P
MC_TorqueControl Torque Control Uses the Torque Control Mode of the Servo Drive to control
the torque.
Motion P
MC_SetTorqueLimit Set Torque Limit Limits the torque output from the Servo Drive through the
torque limit function of the Servo Drive.
Adminis-
tration
O
MC_ZoneSwitch Zone Monitor Determines if the command position or actual current posi-
tion of an axis is within a specified zone.
Adminis-
tration
O
MC_TouchProbe Enable External
Latch
Records the position of an axis when a trigger signal oc-
curs.
Adminis-
tration
P
MC_AbortTrigger Disable External
Latch
Disables the current latch. Adminis-
tration
P
MC_AxesObserve Monitor Axis Follow-
ing Error
Monitors the deviation between the command positions or
actual positions for the specified two axes to see if it ex-
ceeds the allowed value.
Adminis-
tration
O
MC_SyncMoveVe-
locity
Cyclic Synchronous
V
elocity Control
Outputs the value set for the target velocity every primary
period to the Servo Drive in Cyclic Synchronous Velocity
Mode.
Motion O
MC_SyncMoveAb-
solute
Cyclic Synchronous
Absolute Positioning
Cyclically outputs the specified target positions for the ax-
es.
Motion O
MC_Reset Reset Axis Error Clears an axis error. Adminis-
tration
P
MC_ChangeAxisUse Change Axis Use Temporarily changes the Axis Use axis parameter
. Adminis-
tration
P
MC_DigitalCamS-
witch
Enable Digital Cam
Switch
Turns a digital output ON or OFF according to the axis po-
sition.
Adminis-
tration
P
MC_TimeStampTo-
Pos
Time Stamp to Axis
Position Calculation
Calculates the position of the axis for the specified time
stamp.
Adminis-
tration
O
MC_SyncOffsetPosi-
tion
Cyclic Synchronous
Position Of
fset
Compensation
Cyclically adds the specified position offset to the com-
mand current position of the slave axis in synchronized
control, and outputs the result.
Motion O
MC_OffsetPosition
*1
Position Offset
Compensation
Adds the specified position offset to the command current
position of the slave axis in synchronized control with an
acceleration/deceleration curve applied, and outputs the re-
sult.
Motion O
*1. If you use an NY-series Controller, the Controller with unit version 1.21 or later and Sysmac Studio version 1.29 or
higher are required to use this instruction.
For details on the axis states due to instruction execution, refer to the NY-series Industrial Panel PC /
Industrial Box PC Motion Control User’s Manual (Cat. No. W559).
Refer to the compliance list for items that conform to PLCopen
®
technical specifications.
The compliance list can be accessed on the PLCopen
®
website.
2-2-3
Axes Group Commands
This section describes the instructions to perform multi-axes coordinated control for the MC Function
Module.
2 Variables and Instructions
2-35
NY-series Motion Control Instructions Reference Manual (W561)
2-2 Instructions
2
2-2-3 Axes Group Commands