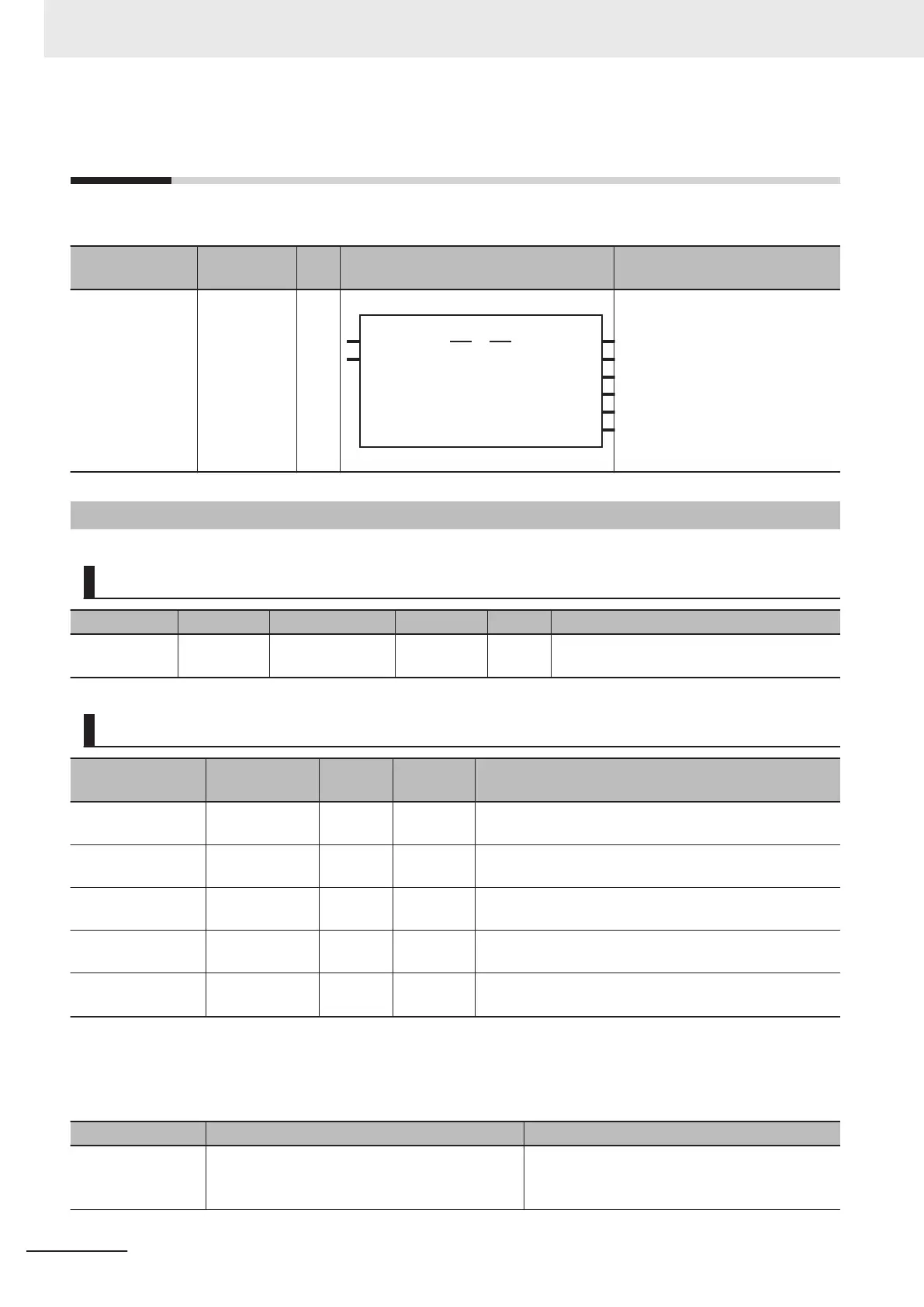
MC_Reset
The MC_Reset instruction clears axis errors.
Instruction Name
FB/
FUN
Graphic expression ST expression
MC_Reset Reset Axis
Error
FB
MC_Reset_in
stance
Failure
Axis Axis
Execute
Error
ErrorID
MC_Reset
Done
Busy
MC_Reset_instance (
Axis :=parameter,
Execute :=parameter,
Done =>parameter,
Busy =>parameter,
Failure =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range Default Description
Execute Execute BOOL TRUE or
FALSE
FALSE The instruction is executed when the value
of this variable changes to TRUE.
Output Variables
Name Meaning
Data
type
Valid
range
Description
Done Done BOOL TRUE or
F
ALSE
TRUE when the instruction is completed.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Failure Failure End BOOL TRUE or
F
ALSE
TRUE when the instruction is not executed normally.
Error Error BOOL TRUE or
F
ALSE
TRUE while there is an error.
ErrorID Error Code WORD
*1
Contains the error code when an error occurs.
A value of 16#0000 indicates normal execution.
*1. The upper four digits of the event code give the error code for ErrorID. Refer to the NY-series Troubleshooting Manual
(Cat. No. W564) for the event codes.
Output Variable Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
Done When error clear processing is completed nor-
mally
.
• When Execute
is TRUE and changes to
FALSE.
• After one period when Execute is FALSE.
3 Axis Command Instructions
3-408
NY-series Motion Control Instructions Reference Manual (W561)