1-2
Basic Information on Motion Control
Instructions
This section describes basic specifications and restrictions for programming with motion control in-
structions for the MC Function Module built into the NY-series Controller.
For details on motion control instructions, refer to Section 3 Axis Command Instructions on page
3-1, Section 4 Axes Group Instructions on page 4-1, and Section 5 Common Command In-
structions on page 5-1.
1-2-1
Motion Control Instruction Names
All motion control instructions for the MC Function Module begin with "MC_".
To see whether an instruction is defined by PLCopen
®
or whether it is an instruction defined for the
MC Function Module itself, refer to 2-2 Instructions on page 2-33.
1-2-2
Languages for Motion Control Instructions
Motion control instructions of the MC Function Module can be used in the following programming lan-
guages.
•
Ladder diagrams (LD)
• Structured text (ST)
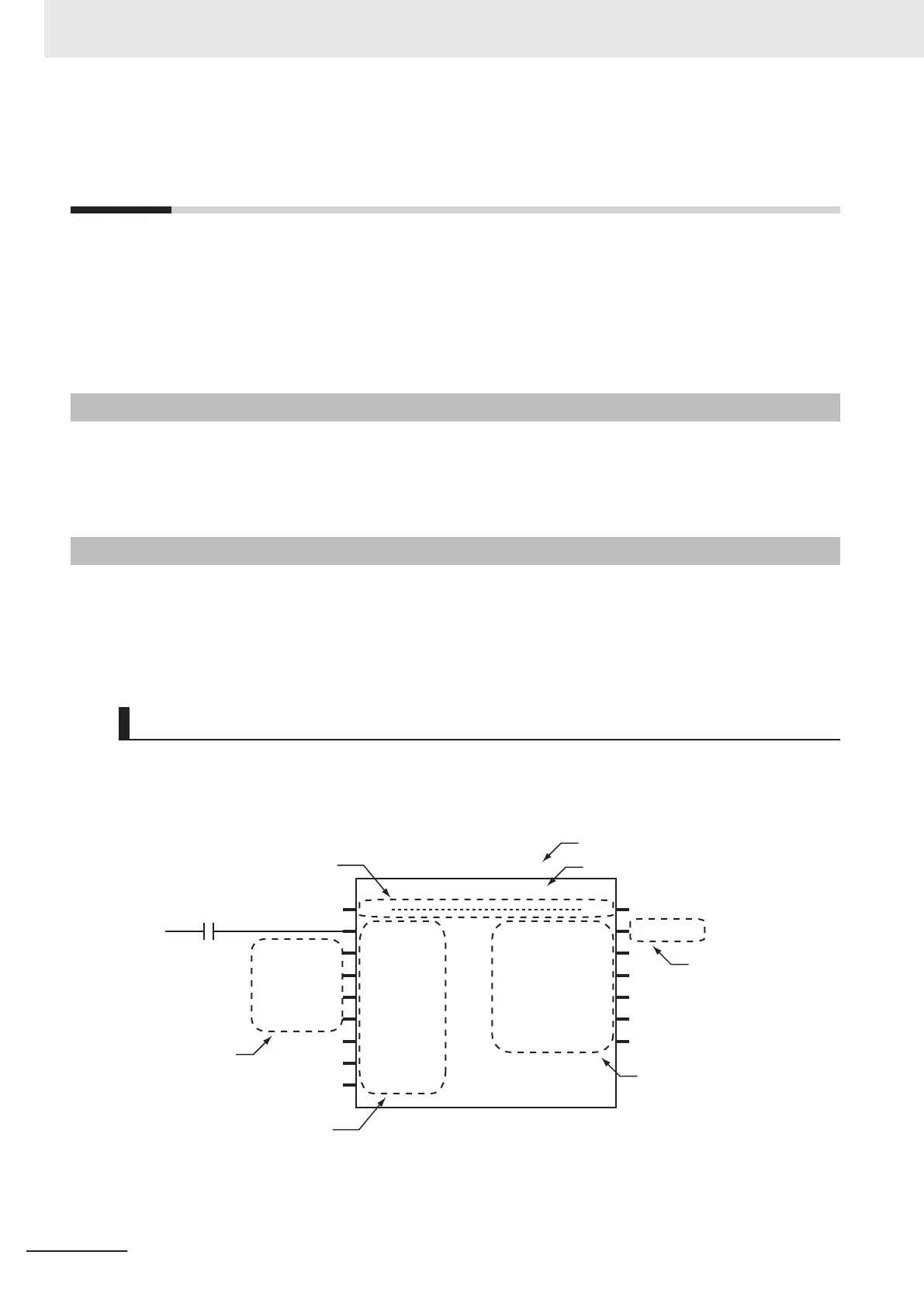
Ladder Diagrams (LD)
Instruction instances of motion control instructions are located in ladder diagrams.
The instruction instances can be named.
The following example shows the MC_MoveAbsolute (Absolute Positioning) instruction.
Input variables
Outp
ut variables
Omitted.
Omitted.
Omitted.
Output parameter
Body name
Instance name
Input parameters
In-out variable
Execute
Error
ErrorID
Command Aborted
MC_ABS_instance
Velocity
Done
Busy
Acceleration
MC_MoveAbsolute
Axis Axis
Position
Deceleration
Jer
k
Direction
BufferMode
Activ
e
MC_Axis001 Axis1
PTP_Absolute
PTP_Position
PTP_Velocity
PTP_Acc
PTP_Dec
PTP_Done
• The axis variable name of the Servo Drive or other device to control is specified with the in-out vari-
able Axis.
•
Motion conditions, such as the target position or target velocity, are specified with input variables.
1 Introduction to Motion Control Instructions
1-8
NY-series Motion Control Instructions Reference Manual (W561)