MC_SyncMoveVelocity
The MC_SyncMoveVelocity instruction outputs the value set for the target velocity every task period to
the Servo Drive in Cyclic Synchronous Velocity Mode.
Instruction Name
FB/
FUN
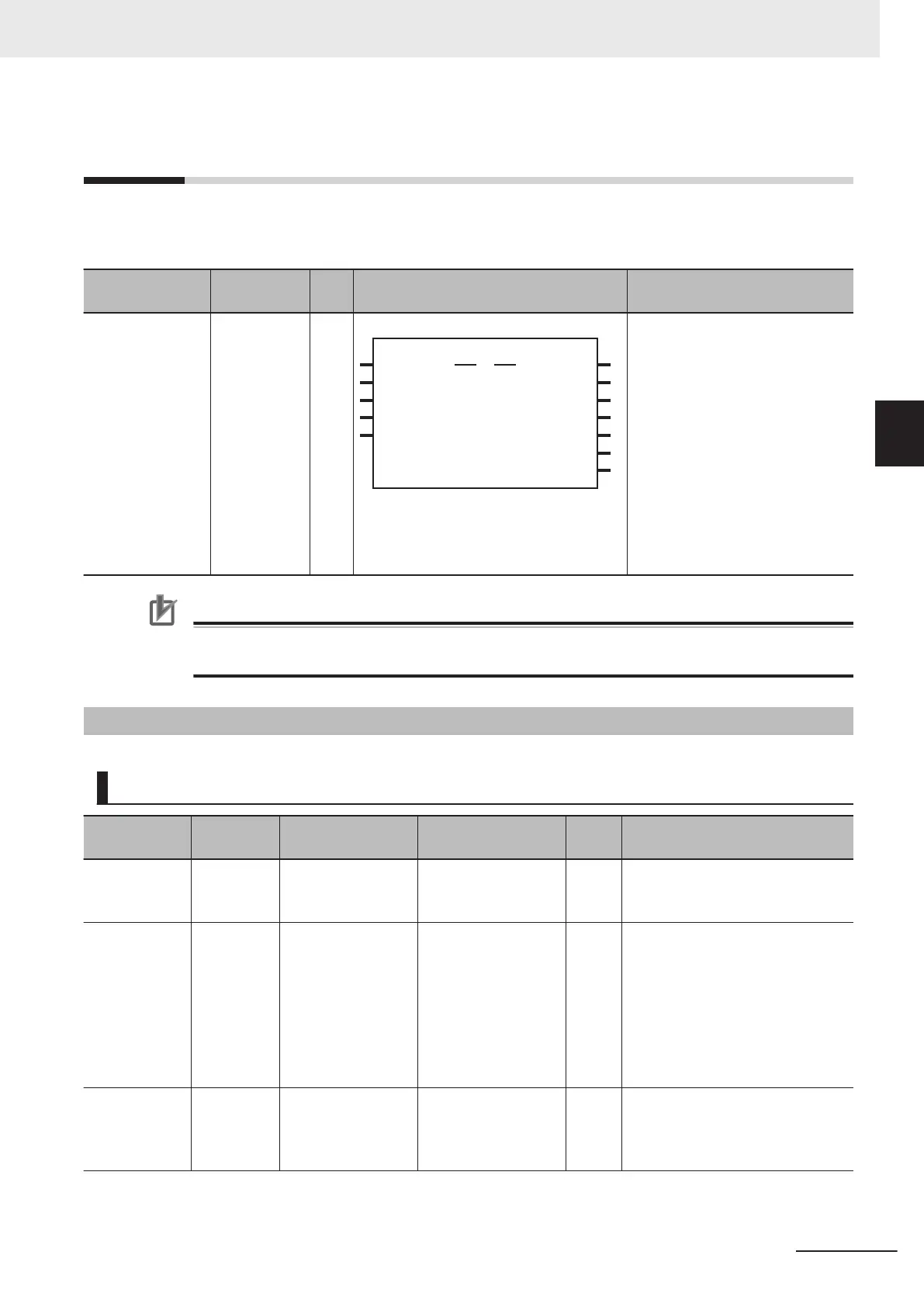
Graphic expression ST expression
MC_SyncMove-
V
elocity
Cyclic Syn-
chronous Ve-
locity Control
FB
MC_SyncMoveVelocity_instance
Axis Axis
Execute InVelocity
Velocity
BufferMode
Error
ErrorID
CommandAborted
Active
MC_SyncMoveVelocity
CmdPosMode
Busy
MC_SyncMoveVelocity_instance (
Axis :=parameter,
Execute :=parameter,
V
elocity :=parameter,
CmdPosMode :=parameter,
BufferMode :=parameter,
InVelocity =>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Precautions for Correct Use
• You cannot use this instruction for an NX-series Pulse Output Unit.
•
Here, the task period is the primary period.
Variables
Input Variables
Name Meaning Data type Valid range
De-
fault
Description
Execute Execute BOOL TRUE or FALSE FALS
E
The instruction is executed when
the value of this variable changes
to TRUE.
Velocity Target Ve-
locity
LREAL Negative number,
positive number
, or 0
0 Set the target velocity.
0: Set the velocity command value
to 0.
Positive value: Move in the positive
direction.
Negative value: Move in the nega-
tive direction.
The unit is command units/s.
*1
CmdPosMode Command
Current Po-
sition Count
Selection
_eMC_CMDPOS_
MODE
0: _mcCount
0
*2
0: Use the actual current position
and update the command current
position.
Home remains defined.
3 Axis Command Instructions
3-391
NY-series Motion Control Instructions Reference Manual (W561)
MC_SyncMoveVelocity
3
Variables