Structures Used for Motion Control
Information required for motion control are defined as structures in PLCopen
®
technical materials. Da-
ta type names and basic aspects are defined, but the contents of the structures are not defined.
The main data types defined in PLCopen
®
and the data types used in the MC Function Module are
shown in the following table.
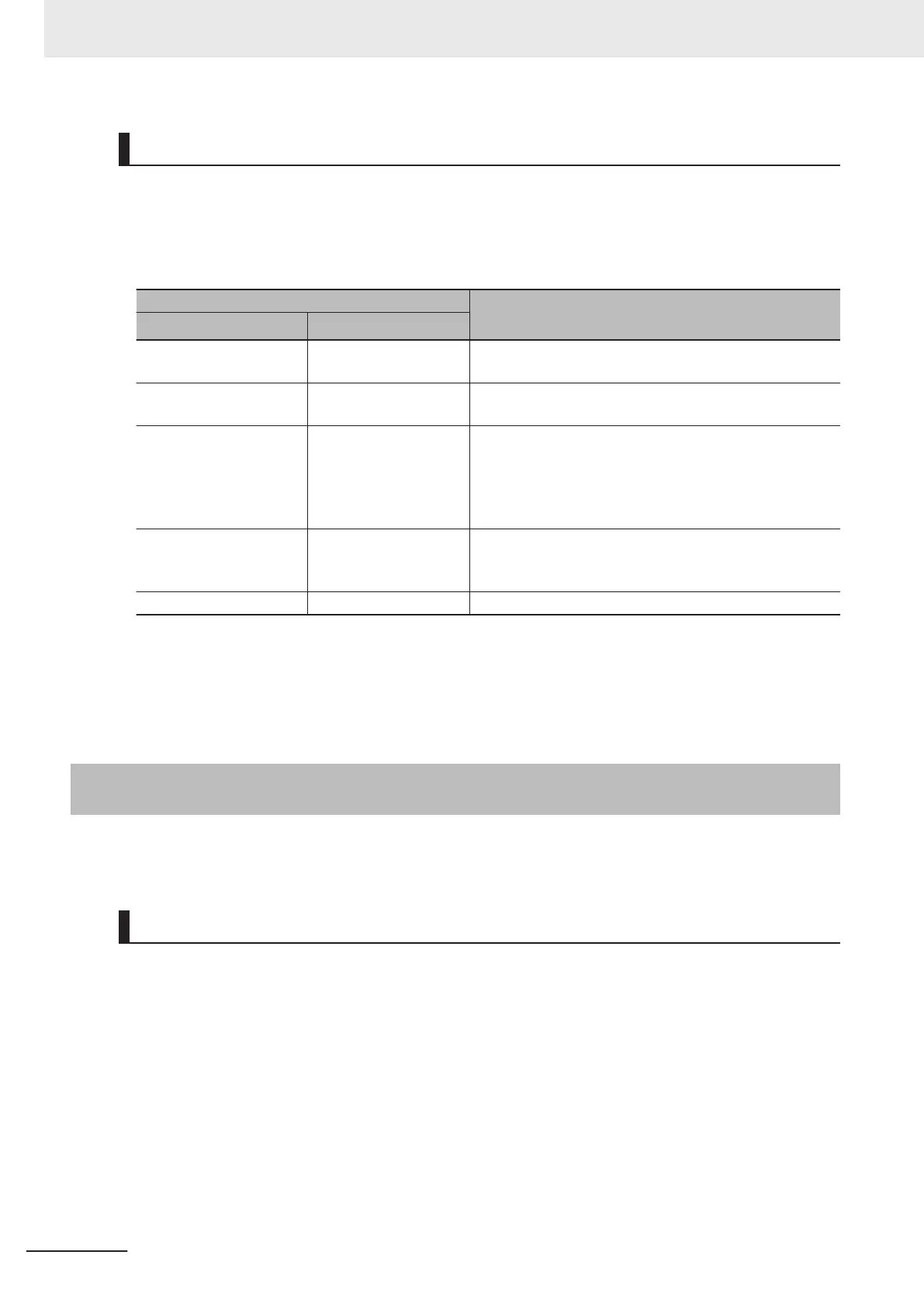
Data type
Definition
PLCopen
®
MC Function Module
AXIS_REF _sAXIS_REF This is a structure that contains information on the corre-
sponding axis.
AXES_GROUP_REF _sGROUP_REF This is a structure that contains information on the corre-
sponding axes group.
TRIGGER_REF _sTRIGGER_REF This is a structure that contains information on trigger in-
puts.
• T
rigger specifications
• Detection pattern information (positive, negative, both,
edge, level, pattern recognition, etc.)
INPUT_REF --- This is a structure that contains information relating to the
input specifications. It may include virtual data.
This data type is not used by the MC Function Module.
OUTPUT_REF _sOUTPUT_REF This is a structure relating to physical outputs.
As shown in the above table, the MC Function Module uses some data types that are defined by
PLCopen
®
and some that are defined specifically for the MC Function Module.
Refer to the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s Manual (Cat. No.
W559) for definitions of the data types and structures that are handled by the MC Motion Module.
1-1-3
Precautions for Master and Auxiliary Axes in Synchronized Con-
trol
Precautions that are related to sudden changes in velocity and conditions that lead to errors are given
below for master and auxiliary axes in synchronized control.
Sudden Changes in Velocity
When the velocity of the master or auxiliary axis changes suddenly when synchronized motion is start-
ed or during synchronized motion, the motion of the slave axis can change suddenly and sometimes
place an excessive load on the machine.
Take suitable precautions in the following cases because the velocity of the master or auxiliary axis
may change suddenly.
• When one of the following three instructions is executed for the master or auxiliary axis:
MC_ImmediateStop instruction
MC_ResetFollowingError instruction
MC_SyncMoveVelocity (Cyclic Synchronous Velocity Control) instruction
To ensure that the slave axis does not move suddenly, set suitable input parameters and execution
timing for the above instructions or execute them after synchronized control has been released.
1 Introduction to Motion Control Instructions
1-6
NY-series Motion Control Instructions Reference Manual (W561)