MC_SyncOffsetPosition
The MC_SyncOffsetPosition cyclically adds the specified position offset to the command current posi-
tion of the slave axis in synchronized control, and outputs the result.
Instruction Name
FB/
FUN
Graphic expression ST expression
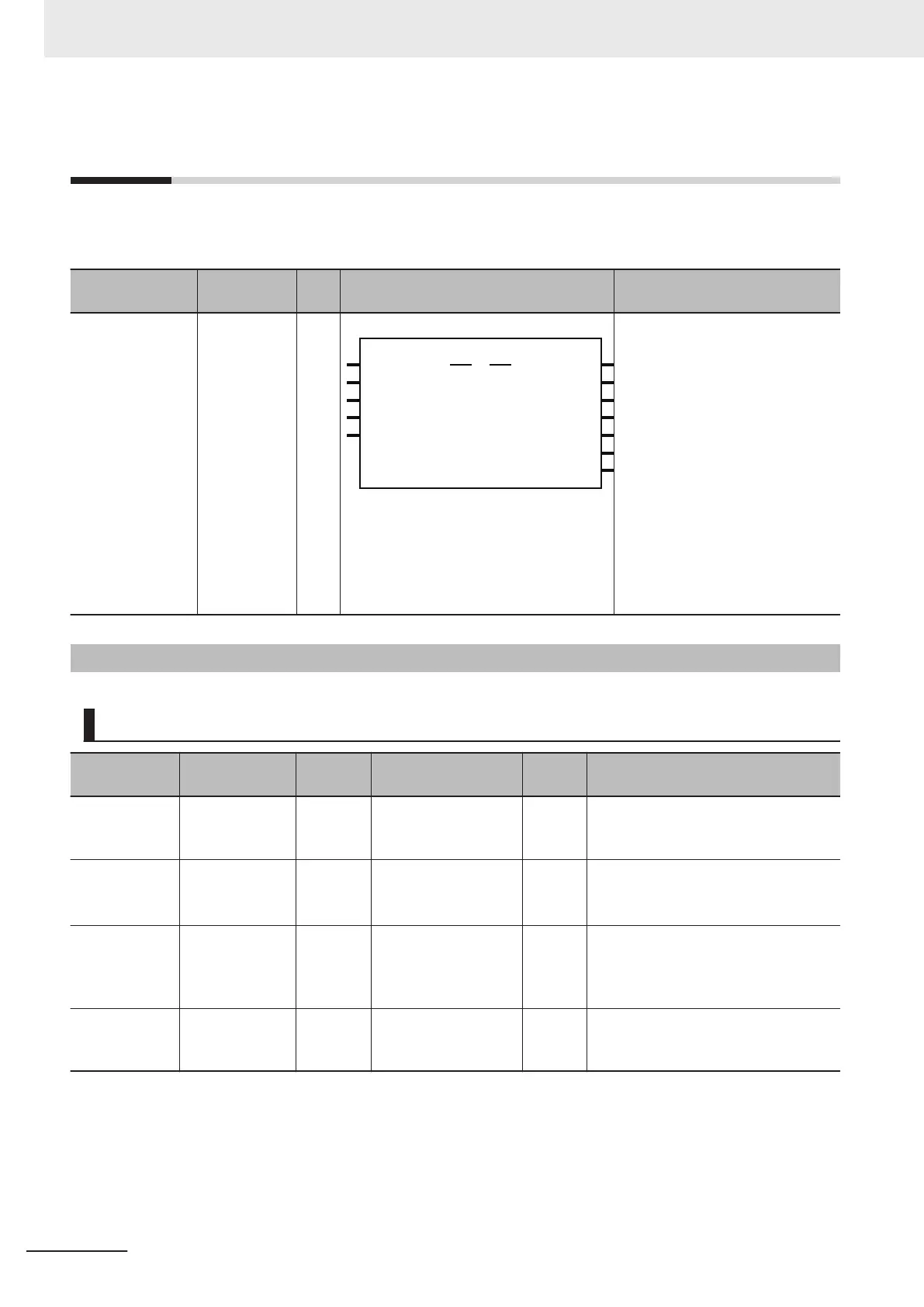
MC_SyncOffset-
Position
Cyclic Syn-
chronous Po-
sition Of
fset
Compensa-
tion
FB
MC_SyncOffsetPosition_instance
Axis Axis
Execute
Busy
OutputtedOffsetPosition
OffsetPosition
Active
Error
ErrorID
MC_SyncOffsetPosition
BufferMode
MoveMode CommandAborted
MC_SyncOffsetPosition_instance
(
Axis :=parameter,
Execute :=parameter,
Of
fsetPosition :=parameter,
BufferMode :=parameter,
MoveMode :=parameter,
OutputtedOffsetPosition
=>parameter,
Busy =>parameter,
Active =>parameter,
CommandAborted =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning
Data
type
Valid range Default Description
Execute Execute BOOL TRUE or FALSE FALSE The instruction is executed when the
value of this variable changes to
TRUE.
OffsetPosition Position Offset LREAL Negative number,
positive number
, or 0
0 Specify the position offset to add to
the command current position.
The unit is command units.
*1
BufferMode Buffer Mode Se-
lection
_eMC_B
UF-
FER_MO
DE
0: _mcAborting
0
*2
Specify the behavior when executing
more than one motion instruction.
0: Aborting
MoveMode Travel Mode _eMC_M
OVE_MO
DE
1: _mcRelative
0
*2
Select the travel method.
1: Relative positioning
*1. Refer to Unit Conversion Settings in the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*2. The default value for an enumeration variable is actually not the number, but the enumerator.
3 Axis Command Instructions
3-448
NY-series Motion Control Instructions Reference Manual (W561)