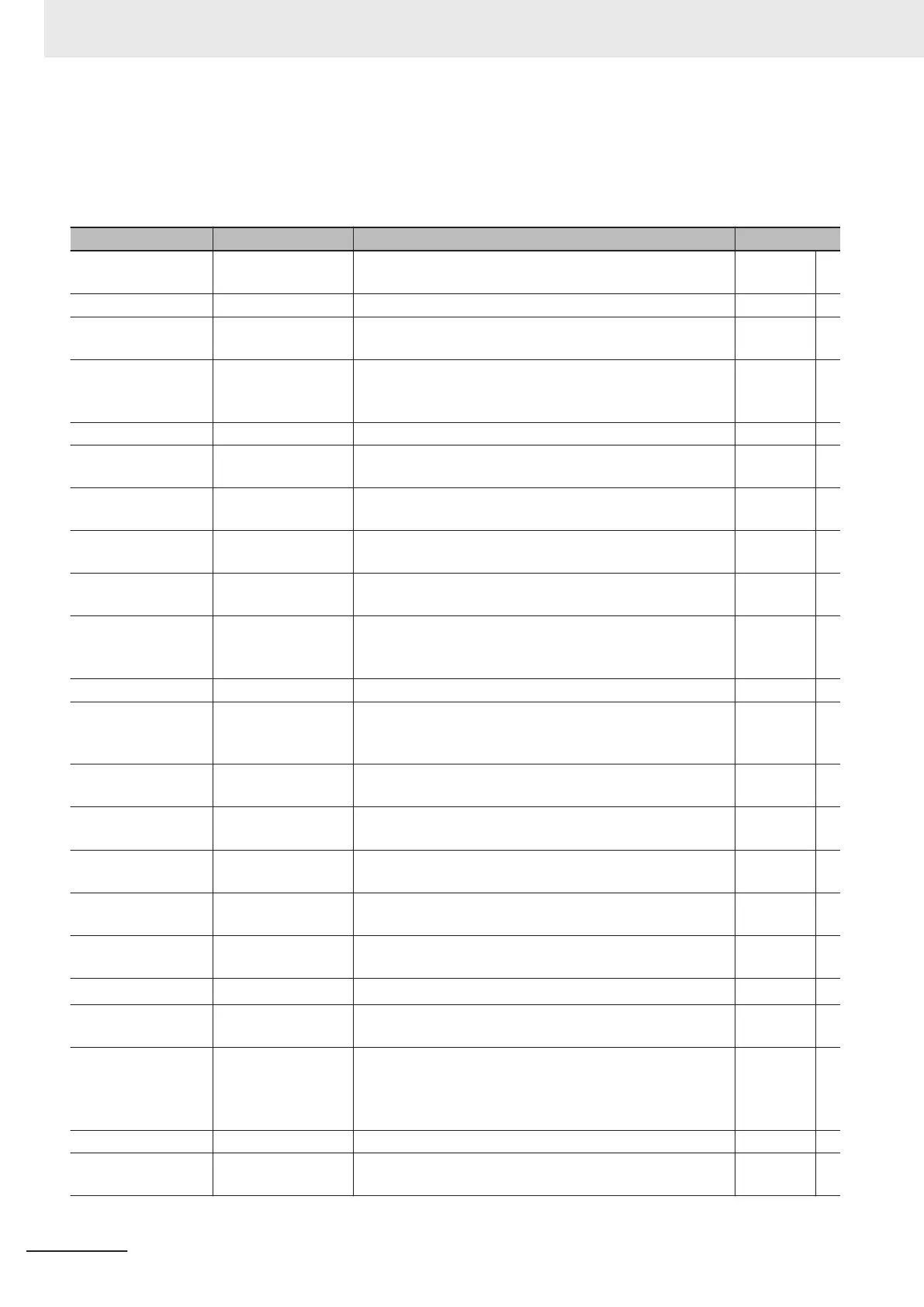
The symbols have the following meanings.
P
: Instructions defined in PLCopen
®
technical specifications.
O : Instructions defined for the MC Function Module.
Instruction Instruction name Outline Classification
MC_Power Power Servo Makes the Servo Drive ready to operate. Adminis-
tration
P
MC_MoveJog Jog Performs jogging according to the specified target velocity. Motion O
MC_Home Home Operates the motor to determine home using the limit sig-
nals, home proximity signal, and home signal.
Motion P
MC_HomeWithPara-
meter
Home with Parame-
ters
Sets the homing parameter and operates the motor to de-
termine home. It uses the limit signals, home proximity sig-
nal, and home signal.
Motion O
MC_Move Positioning Performs absolute positioning or relative positioning. Motion O
MC_MoveAbsolute Absolute Positioning Performs positioning for the specified absolute target posi-
tion.
Motion P
MC_MoveRelative Relative Positioning Performs positioning for the specified travel distance from
the command current position.
Motion P
MC_MoveVelocity Velocity Control Performs velocity control with the Position Control Mode of
the Servo Drive.
Motion P
MC_MoveZeroPosi-
tion
High-speed Home Performs positioning with an absolute position of 0 as the
target position to return to home.
Motion O
MC_MoveFeed Interrupt Feeding Positioning is performed for the specified travel distance
from the position where an external device triggers an inter-
rupt input.
Motion O
MC_Stop Stop Decelerates an axis to a stop. Motion P
MC_ImmediateStop Immediate Stop Stops an axis according to the stopping mode that is set
with the StopMode (Stopping Mode Selection) input varia-
ble regardless of the status of the axis.
Motion O
MC_SetPosition Set Position Changes the command current position or the actual cur-
rent position as required for an axis.
Adminis-
tration
P
MC_SetOverride Set Override Fac-
tors
Changes the target velocity for an axis. Adminis-
tration
P
MC_ResetFollowin-
gError
Reset Following Er-
ror Counter
Resets the following error between the command position
and the actual position.
Motion O
MC_CamIn Start Cam Opera-
tion
Starts cam operation with a specified cam table. Motion P
MC_CamOut End Cam Operation Ends cam operation for the axis specified with the input pa-
rameter
.
Motion P
MC_CamMonitor
*1
Cam Monitor Monitors information on the cam operation. Motion O
MC_GearIn Start Gear Opera-
tion
Specifies the gear ratio between the master axis and the
slave axis and starts gear operation.
Motion P
MC_GearInPos Positioning Gear
Operation
Specifies the gear ratio between the master axis and the
slave axis and starts electronic gear operation. Specifies
the positions of the master axis and slave axis to start syn-
chronization.
Motion P
MC_GearOut End Gear Operation Cancels MC_GearIn and MC_GearInPos instructions. Motion P
MC_MoveLink Synchronous Posi-
tioning
Performs positioning in sync with the specified master axis. Motion O
2 Variables and Instructions
2-34
NY-series Motion Control Instructions Reference Manual (W561)