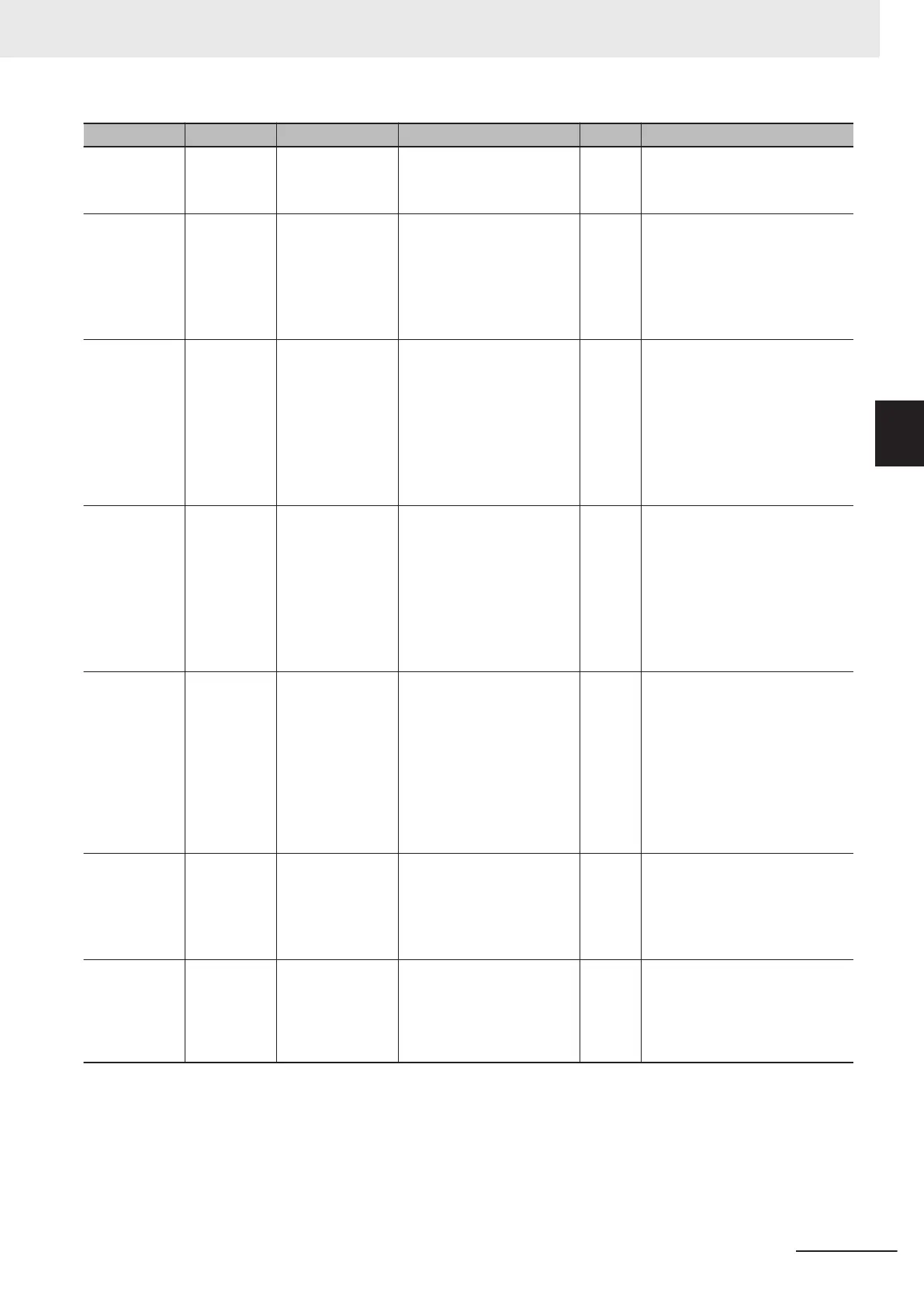
Name Meaning Data type Valid range Default Description
SlaveDis-
tance
Slave Axis
T
ravel Dis-
tance
LREAL Negative number, positive
number, or 0
0 Specify the travel distance of
the slave axis.
The unit is command units.
*4
MasterDis-
tance
Master Axis
T
ravel Dis-
tance
LREAL Non-negative number 0 Specify the travel distance of
the master axis as an unsigned
absolute value. The value is
valid for both positive and nega-
tive travel of the master axis.
The unit is command units.
*4
MasterDistan-
ceInACC
Master Dis-
tance in Ac-
celeration
LREAL Non-negative number 0 Specify the travel distance of
the master axis while the slave
axis is accelerating. Specify the
unsigned absolute value. The
value is valid for both positive
and negative travel of the mas-
ter axis.
The unit is command units.
*4
MasterDistan-
ceInDEC
Master Dis-
tance in De-
celeration
LREAL Non-negative number 0 Specify the travel distance of
the master axis while the slave
axis is decelerating. Specify the
unsigned absolute value. The
value is valid for both positive
and negative travel of the mas-
ter axis.
The unit is command units.
*4
LinkOption Synchroni-
zation Start
Condition
_eMC_LINKOP-
TION
0: _mcCommandExecution
1: _mcT
riggerDetection
2: _mcMasterReach
0
*2
Specify the condition for the
slave axis to synchronize with
the master axis.
0: When instruction execution
starts
1: When trigger is detected
2: When the master axis reach-
es the master following dis-
tance.
MasterStart
Distance
Master Fol-
lowing Dis-
tance
LREAL Negative number, positive
number
, or 0
0 Specify the absolute position of
the master axis when the slave
axis starts following the master
axis.
The unit is command units.
*4
BufferMode Buffer Mode
Selection
_eMC_BUF-
FER_MODE
0: _mcAborting
1: _mcBuf
fered
0
*2
Specify the behavior when exe-
cuting more than one motion in-
struction.
0: Aborting
1: Buffered
*1. To use _mcLatestCommand, the following condition must be met for the master and slave axes.
When you use this variable, the axis number set for the Master (Master Axis) in the system-defined variable for motion
control must be lower than the axis number set for the Slave
(Slave Axis) in the system-defined variable for motion
control.
*2. The default value for an enumeration variable is actually not the number, but the enumerator.
*3. The task period is the primary period.
*4. Refer to Unit Conversion Settings in the NY-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
3 Axis Command Instructions
3-295
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveLink
3
Variables