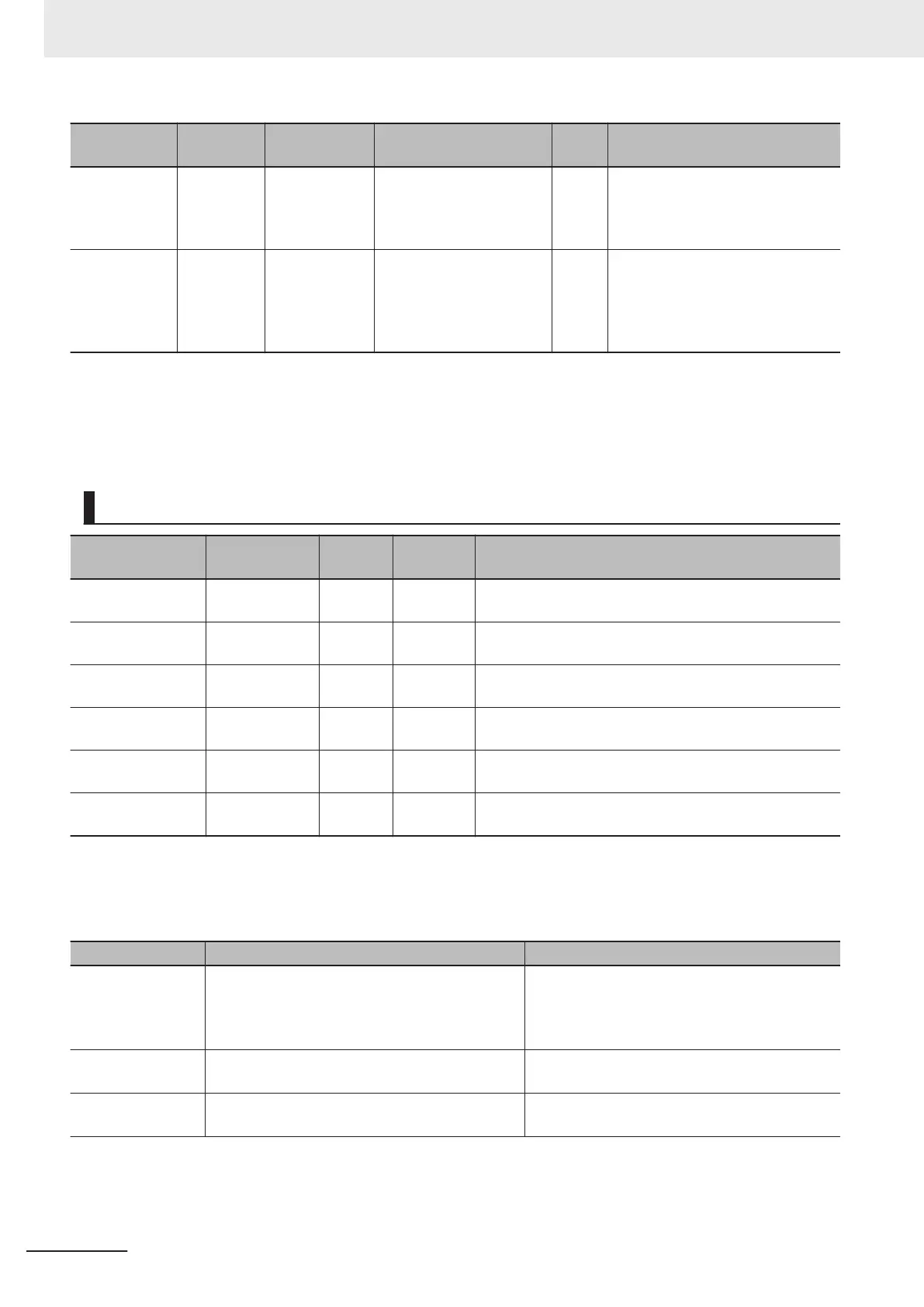
Name Meaning Data type Valid range
De-
fault
Description
Direction Direction _eMC_DIREC-
TION
0: _mcPositiveDirection
2: _mcNegativeDirection
0
*3
Specify the direction of the target
torque.
0: Positive direction
2: Negative direction
BufferMode Buffer
Mode Se-
lection
_eMC_BUF-
FER_MODE
0: _mcAborting
1: _mcBuf
fered
0
*3
Specify the behavior when execut-
ing more than one motion instruc-
tion.
0: Aborting
1: Buffered
*1. If a value that is higher than 1,000.0% is specified, it will be treated as 1,000.0%. If a negative value is specified, it will
be treated as 0.0%.
*2. Refer to Unit Conversion Settings in the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*3. The default value for an enumeration variable is actually not the number, but the enumerator.
Output Variables
Name Meaning
Data
type
Valid
range
Description
InTorque Target Torque
Reached
BOOL TRUE or
FALSE
TRUE when the target torque is reached.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Active Controlling BOOL TRUE or
F
ALSE
TRUE when the axis is being controlled.
CommandAborted Command
Aborted
BOOL TRUE or
F
ALSE
TRUE when the instruction is aborted.
Error Error BOOL TRUE or
F
ALSE
TRUE while there is an error.
ErrorID Error Code WORD
*1
Contains the error code when an error occurs.
A value of 16#0000 indicates normal execution.
*1. The upper four digits of the event code give the error code for ErrorID. Refer to the NY
-series Troubleshooting Manual
(Cat. No. W564) for the event codes.
Output Variable Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
InTorque When target torque is output.
• When Error changes to TRUE.
• When CommandAborted changes to TRUE.
• When the instruction is re-executed and the
target torque is changed.
Busy When Execute changes to TRUE.
• When Error
changes to TRUE.
• When CommandAborted changes to TRUE.
Active When output of the torque command value starts.
• When Error changes to TRUE.
• When CommandAborted changes to TRUE.
3 Axis Command Instructions
3-336
NY-series Motion Control Instructions Reference Manual (W561)