Concretely, the torque limits of the instance that was executed last are valid. If Enable to the instance
that was executed last changes to F
ALSE, the torque limits are disabled.
Errors
If an error occurs during instruction execution, Error
will change to TRUE.
You can find out the cause of the error by referring to the value output by ErrorID (Error Code).
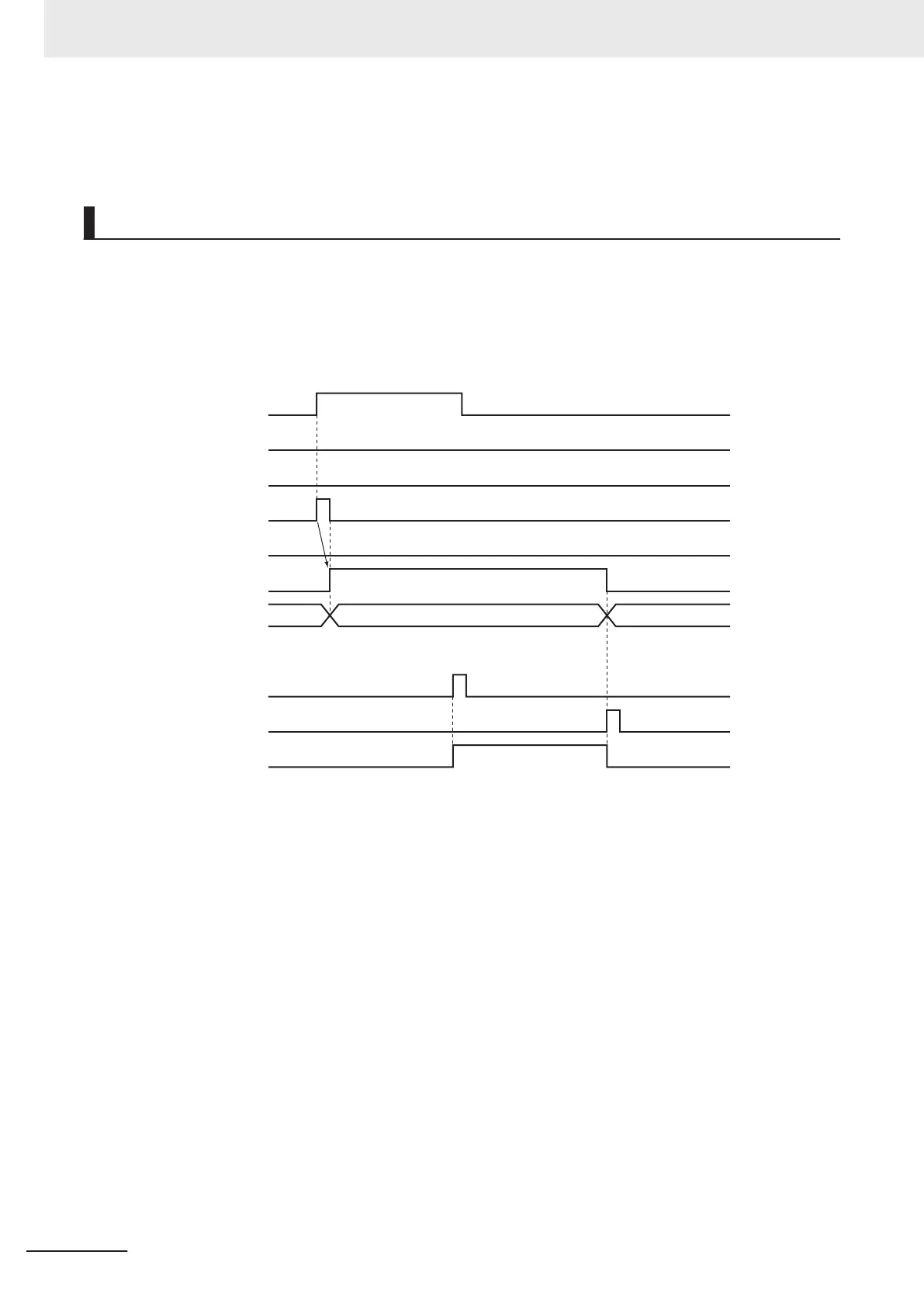
Timing Chart When Error Occurs
NegativeEnable
PositiveEnable
Enabled
Busy
Error
16#0000
ErrorID
Enable
Busy
Done
Execute
16#0000
MC_SetTorqueLimit Instruction
MC_Reset Instruction
Error code
Error Codes
Refer to the NY
-series Troubleshooting Manual (Cat. No. W564) for instruction errors.
3 Axis Command Instructions
3-354
NY-series Motion Control Instructions Reference Manual (W561)