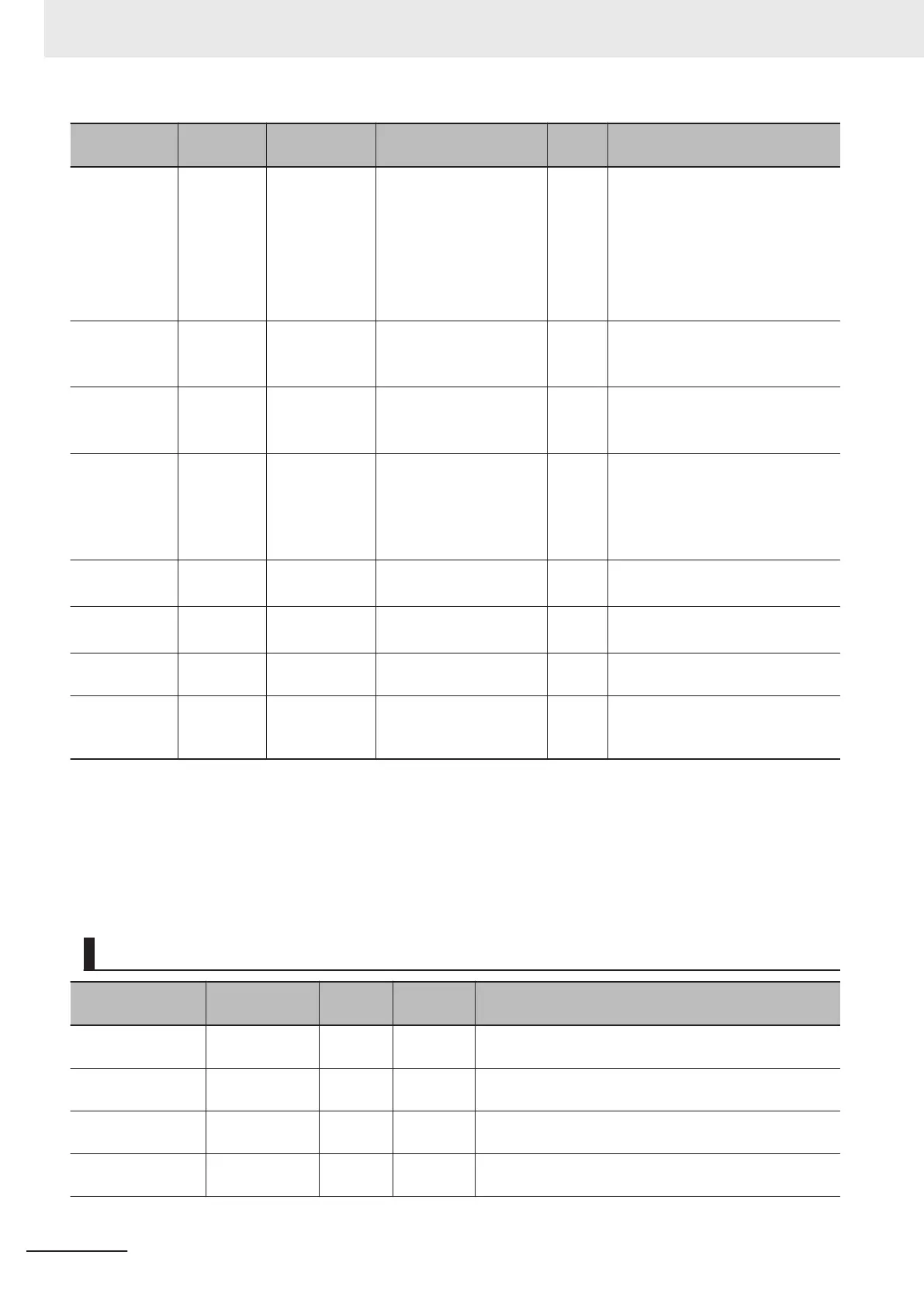
Name Meaning Data type Valid range
De-
fault
Description
ReferenceType
*1
Position
T
ype Selec-
tion
_eMC_REF-
ERENCE_TYP
E
0: _mcCommand
1: _mcFeedback
2: _mcLatestCommand
0
*2
Specify the position type.
0: Command position (value calcu-
lated in the previous task period
*3
)
1: Actual position (value obtained
in the same task period
*3
)
2: Command position (value calcu-
lated in the same task period
*3
)
MasterSync
Position
Master
Sync Posi-
tion
LREAL Negative number, posi-
tive number
, or 0
0 Specify the absolute master sync
position.
The unit is command units.
*4
SlaveSyncPo-
sition
Slave Sync
Position
LREAL Negative number, posi-
tive number
, or 0
0 Specify the absolute slave sync po-
sition.
The unit is command units.
*4
Velocity Target ve-
locity
LREAL Positive number 0 Specify the target velocity. Always
set the target velocity
. If the axis is
moved without setting a target ve-
locity, an error will occur.
The unit is command units/s.
*4
Acceleration Accelera-
tion Rate
LREAL Non-negative number 0 Specify the acceleration rate.
The unit is command units/s
2
.
*4
Deceleration Decelera-
tion Rate
LREAL Non-negative number 0 Specify the deceleration rate.
The unit is command units/s
2
.
*4
Jerk
(Reserved)
Jerk LREAL 0 0 (Reserved)
BufferMode
(Reserved)
Buffer
Mode Se-
lection
_eMC_BUF-
FER_MODE
0: _mcAborting
0
*2
(Reserved)
*1. To use _mcLatestCommand, the following condition must be met for the master and slave axes.
The axis number set for the Master (Master Axis) in the system-defined variable for motion control must be lower than
the axis number set for Slave (Slave Axis) in the system-defined variable for motion control.
*2. The default value for an enumeration variable is actually not the number, but the enumerator.
*3. The primary period is taken as the task period.
*4. Refer to Unit Conversion Settings in the NY-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
Output Variables
Name Meaning
Data
type
Valid
range
Description
StartSync Following BOOL TRUE or
F
ALSE
TRUE when acceleration/deceleration is started for syn-
chronization.
InSync In Sync BOOL TRUE or
F
ALSE
TRUE when the slave axis reaches the slave sync posi-
tion.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Active Controlling BOOL TRUE or
F
ALSE
TRUE while the axis is being controlled.
3 Axis Command Instructions
3-268
NY-series Motion Control Instructions Reference Manual (W561)