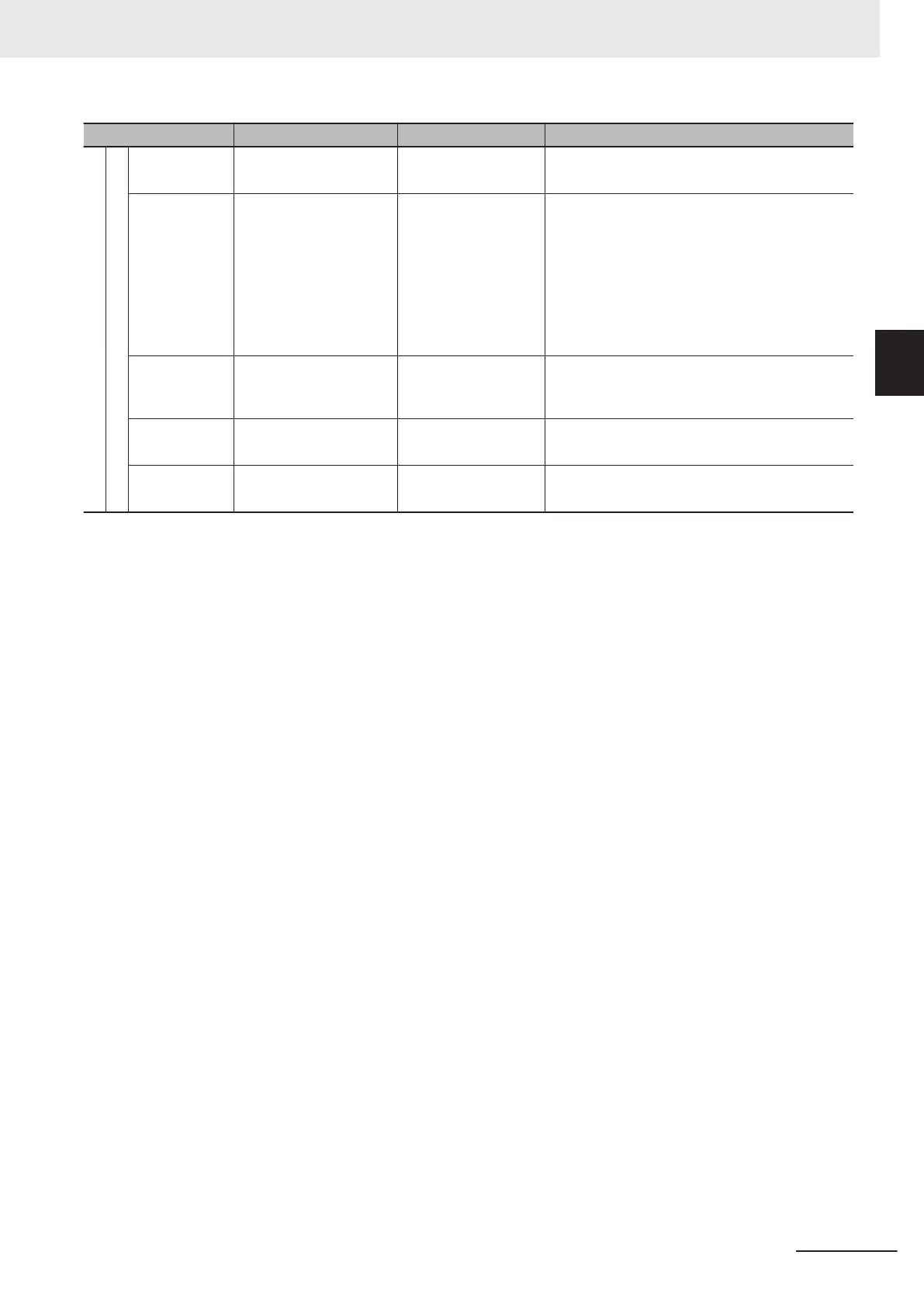
Name Data type Meaning Function
Den LREAL Work Travel Distance
Per Motor Rotation
Contains the workpiece travel distance per mo-
tor rotation for command positions.
*14
Units _eMC_UNITS Unit of Display Contains the display unit for command posi-
tions.
0: _mcPls(pulse)
1: _mcMm(mm)
2: _mcUm(
μm)
3: _mcNm(nm)
4: _mcDeg(degree)
5: _mcInch(inch)
CountMode _eMC_COUNT_MODE Count Mode Contains the count mode.
0: _mcCountModeLinear (Linear Mode)
1: _mcCountModeRotary (Rotary Mode)
MaxPos LREAL Maximum current po-
sition
Contains the maximum value of the current po-
sition indication.
*15
MinPos LREAL Minimum current po-
sition
Contains the minimum value of the current po-
sition indication.
*16
*1. Gives the control status of the command.
*2. This also includes states where processing is performed while in motion at velocity 0, during following error counter
resets, during synchronized control, and during multi-axes coordinated control motion.
*3. Even if the variable is TRUE, the home must be defined again in the following cases.
• When you make a change in the position count settings or the unit conversion settings.
• If an error or erroneous operation occurs on the Servo Drive, which leads to loss of absolute position data. Exam-
ples of errors and erroneous operations include breaks of encoder cables and clear of absolute encoder data.
*4. Use V
elLimit only for a slave axis that is currently in synchronized control.
*5. Gives the command travel direction.
*6. Gives the status of the Servo Drive or other device.
*7. This variable shows the status of the signal that is set for Encoder Z-Phase Search of Digital inputs in the Detailed
Settings Area of the Axis Basic Settings Display of the Sysmac Studio. You may not be able to map this signal to a
PDO for a servo driver from another manufacturer. Refer to the manual for the servo driver.
*8. This variable shows the status of bit 11(internal limit active) of the Status word (6041 hex) mapped to a PDO. The con-
dition for it to change to TRUE depends on the specifications of the Servo Drive. Refer to the manual for the servo
driver. For the OMRON 1S-series Servo Drive or G5-series Servo Drive, this variable gives one of the following limits:
torque limits, velocity limit, drive prohibit inputs, and software limits.
*9. These variables are based on the value of the Modes of operation display (6061 hex) mapped to a PDO. The condi-
tions for CSP, CSV, and CST to change to TRUE depend on the specifications of the Servo Drive. Refer to the manual
for the servo driver.
If the Modes of operation display (6061 hex) is not mapped to a PDO, they are TRUE when the status of the Status-
word (6041 hex) that was mapped to a PDO is Operation Enabled.
*10. When process data communications is not established between the NY-series Controller and an EtherCAT slave as-
signed to an axis or between the NY-series Controller and an NX Unit, the actual current position and command cur-
rent position in the Axis Variable will be the actual current position from just before process data communications
changed to a non-established state.
*11. This variable shows the settings in the Axis Basic Settings.
*12. For an NX-series Position Interface Unit, this is the node address of the EtherCAT Coupler Unit under which the Posi-
tion Interface Unit is mounted.
*13. This variable shows the settings of the electronic gear ratio.
*14. The parameter is disabled if you set to use a reducer in the unit conversion settings. To confirm alternatively enabled
parameters, i.e. W
ork Travel Distance Per Rotation, Work Gear Ratio, and Motor Gear Ratio, use the MC_Read-
AxisParameter (Read Axis Parameters) instruction.
*15. If the Count Mode is set to Linear Mode, the position just before an overflow is given. In Rotary Mode, the modulo
maximum position is given.
2 Variables and Instructions
2-9
NY-series Motion Control Instructions Reference Manual (W561)
2-1 Variables
2
2-1-2 Axis Variables