Re-execution of Motion Control Instructions
You can change the operation of the instruction if you change an input variable during positioning and
change Execute to TRUE again.
Input variables Position (T
arget Position), Velocity (Target Velocity), Acceleration (Acceleration Rate),
and Deceleration (Deceleration Rate) can be changed by re-executing the motion control instruction.
For details on re-execution of motion control instructions, refer to the NY-series Industrial Panel PC /
Industrial Box PC Motion Control User’s Manual (Cat. No. W559).
Multi-execution of Motion Control Instructions
For details on multi-execution of motion control instructions, refer to the NY
-series Industrial Panel
PC / Industrial Box PC Motion Control User’s Manual (Cat. No. W559).
Execution during Execution of Other Instructions
You can switch to this instruction or buffer this instruction if you execute it during execution of another
instruction.
You can buffer one instruction per axis.
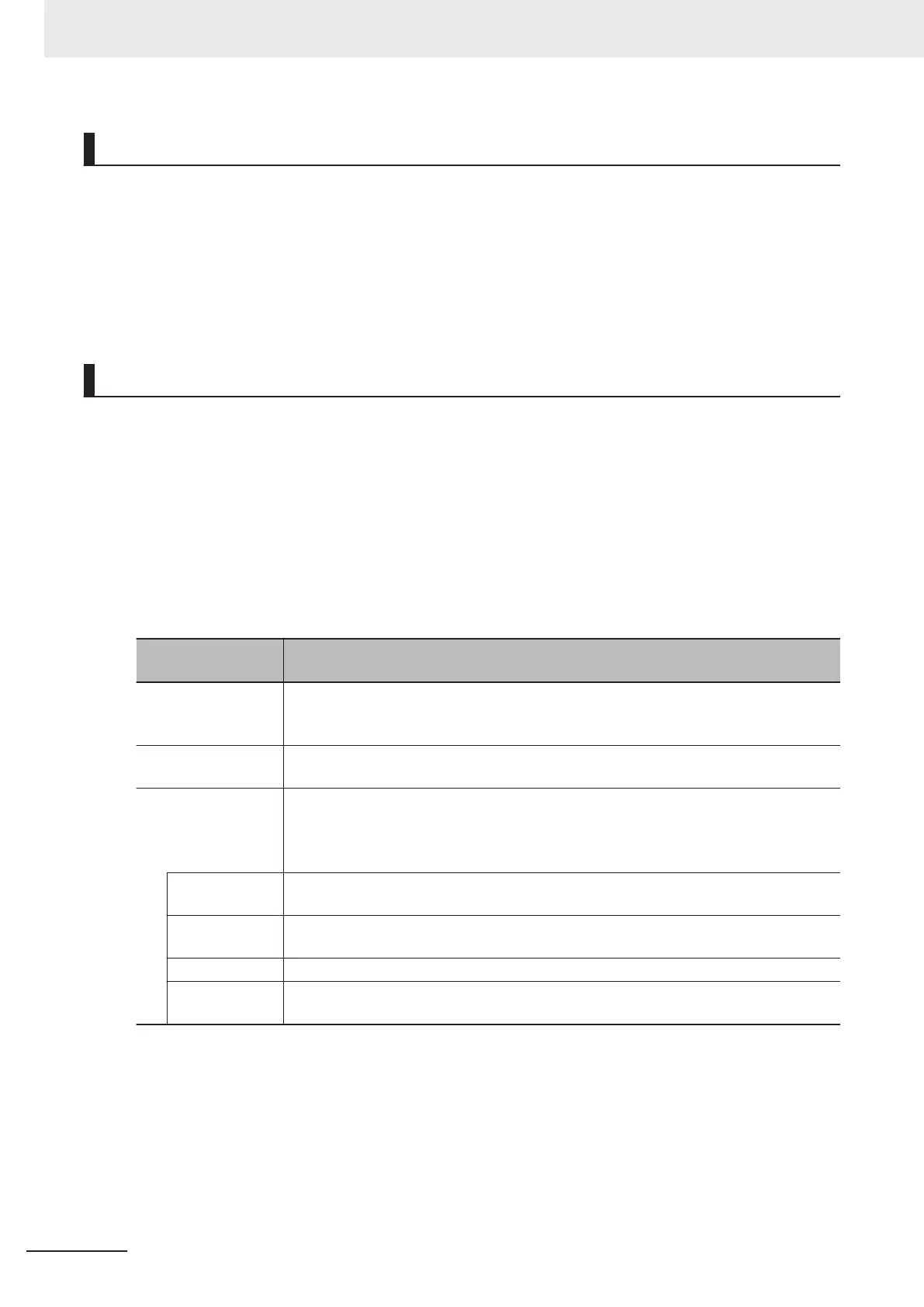
Specify the operation of this instruction with BufferMode (Buffer Mode Selection) for multi-execution of
instructions.
Buffer Mode Selec-
tion
Description
Aborting Aborts the instruction being executed and switches to this instruction.
If the direction of axis motion is reversed by switching instructions, the motion will be
reversed according to the Operation Selection at Reversing
axis parameter.
Buffered Buffers this instruction and executes it automatically after the current instruction is com-
pleted.
Blending Starts the buffered instruction at the velocity (transit velocity) at which the current in-
struction reaches the target position. The operation of the current instruction is changed
so that the axes reach the target position at the transit velocity
. There are four methods
to specify the transit velocity. These are described below.
Blending low The lower of the target velocities of the current instruction and the buffered instruction is
used as the transit velocity
.
Blending previ-
ous
The target velocity of the current instruction is used as the transit velocity.
Blending next The target velocity of the buffered instruction is used as the transit velocity.
Blending high The higher of the target velocities of the current instruction and the buffered instruction
is used as the transit velocity
.
For details on BufferMode (Buf
fer Mode Selection), refer to the NY-series Industrial Panel PC /
Industrial Box PC Motion Control User’s Manual (Cat. No. W559).
Execution of Other Instructions during Instruction Execution
If you execute another instruction during execution of this instruction, you can specify Aborting,
Buffered, or Blending.
3 Axis Command Instructions
3-60
NY-series Motion Control Instructions Reference Manual (W561)