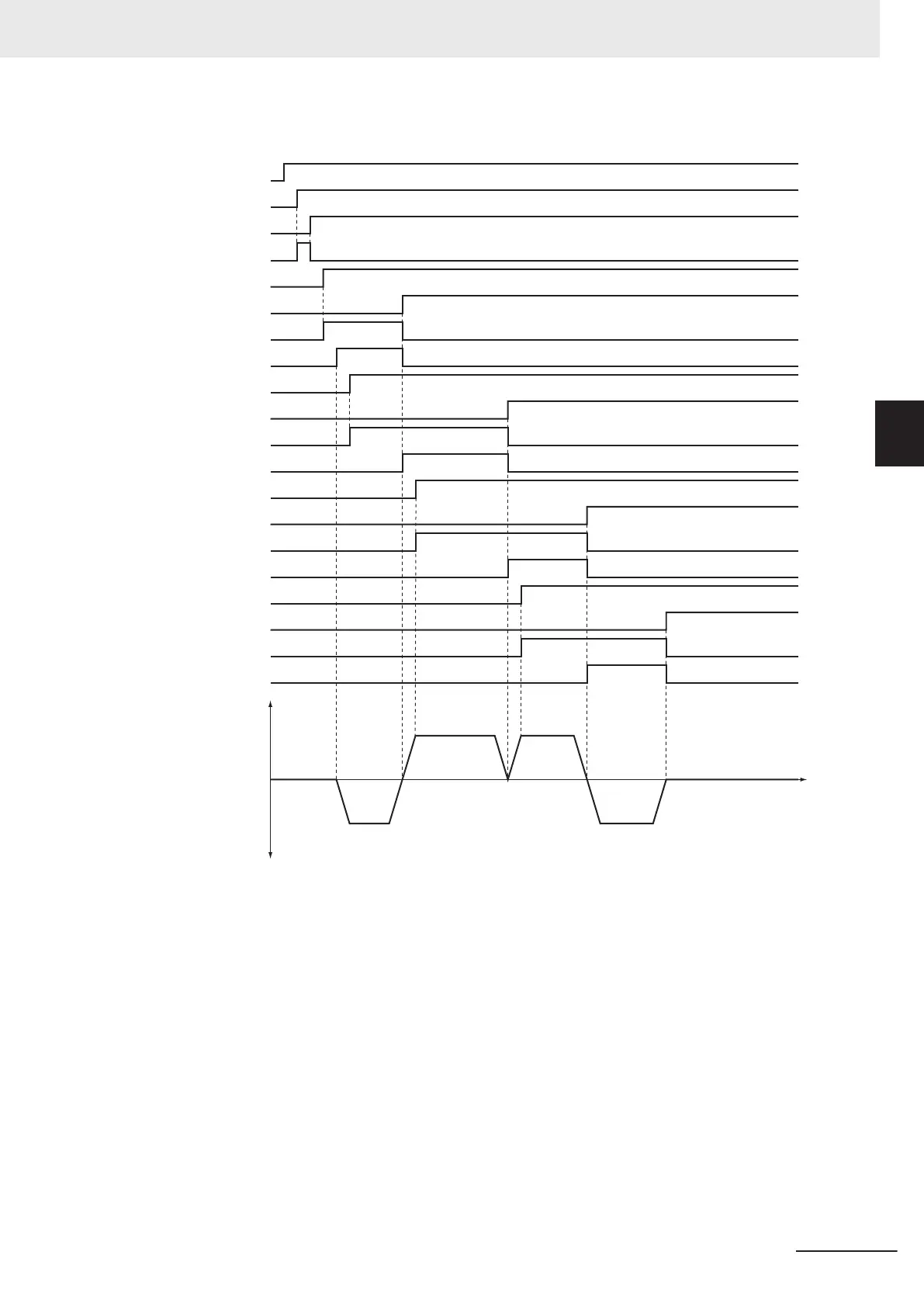
Timing Chart
Pwr_Status
Hm_Ex
Hm_D
Hm_Bsy
Mv_Abs1_Ex
Mv_Abs1_D
Mv_Abs1_Bsy
Mv_Abs1_Act
Mv_Abs2_Ex
Mv_Abs2_D
Mv_Abs2_Bsy
Mv_Abs2_Act
Mv_Abs3_Ex
Mv_Abs3_D
Mv_Abs3_Bsy
Mv_Abs3_Act
Mv_Abs4_Ex
Mv_Abs4_D
Mv_Abs4_Bsy
Mv_Abs4_Act
MC_Axis000
Comm
and velocity
Time
Sample Programming
// Processing when input parameters are not set
IF InitFlag = FALSE THEN
// MV_ABS1 parameters
Mv_Abs1_Pos := LREAL#290.0;
Mv_Abs1_Vel := LREAL#250.0;
Mv_Abs1_Acc := LREAL#1000.0;
Mv_Abs1_Dec := LREAL#1000.0;
Mv_Abs1_Dir := _eMC_DIRECTION#_mcShortestWay;
// MV_ABS2 parameters
Mv_Abs2_Pos := LREAL#90.0;
Mv_Abs2_Vel := LREAL#250.0;
3 Axis Command Instructions
3-75
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveAbsolute
3
Sample Programming 2