0
Time
Travel
distance
Command current position
Acceleration
Target
velocity
Velocity
Specify Jerk when you want to accelerate or decelerate smoothly
.
The following chart shows an operation example when Jerk is specified.
0
Time
Travel
distance
Command current position
Target
velocity
Velocity
For details on Jerk, refer to the NY
-series Industrial Panel PC / Industrial Box PC Motion Control
User’s Manual (Cat. No. W559).
Instruction Details
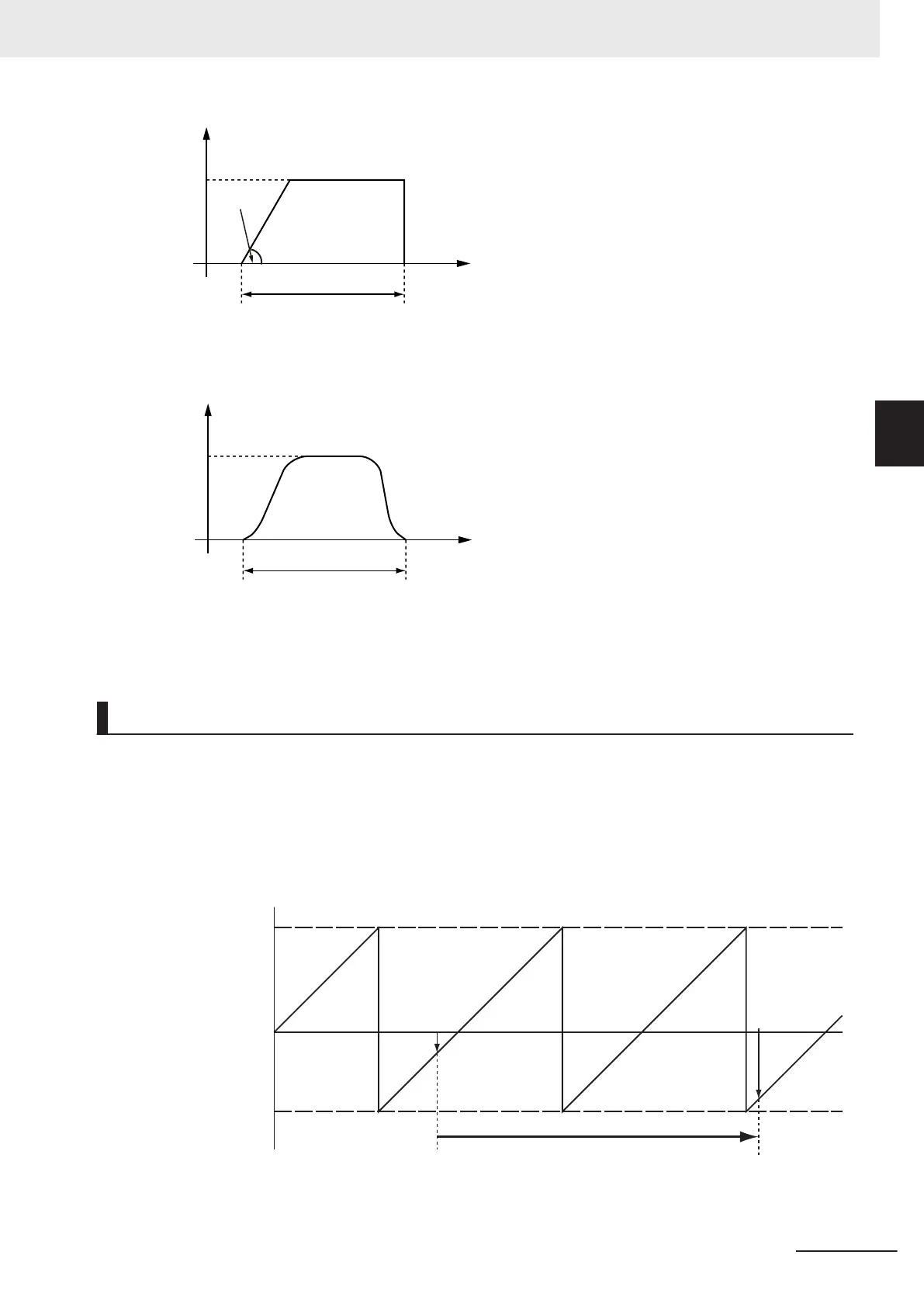
When the Count Mode is Rotary Mode you can specify a Distance (T
ravel Distance) that exceeds the
relative distance range from the Modulo Minimum Position Setting Value axis parameter to the
Modulo Maximum Position Setting Value axis parameter so that you can perform multiple ring rota-
tion positioning.
The following chart shows an operation example when the command current position is -20 and
Distance (Travel Distance) is 300.
0
Position after
positioning: −60
Performs relative positioning with travel distance of 300.
300
Modulo maximum
position setting
value: 100
Modulo minimum
position setting
value: −70
Command
current
position: −20
3 Axis Command Instructions
3-83
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveRelative
3
Function