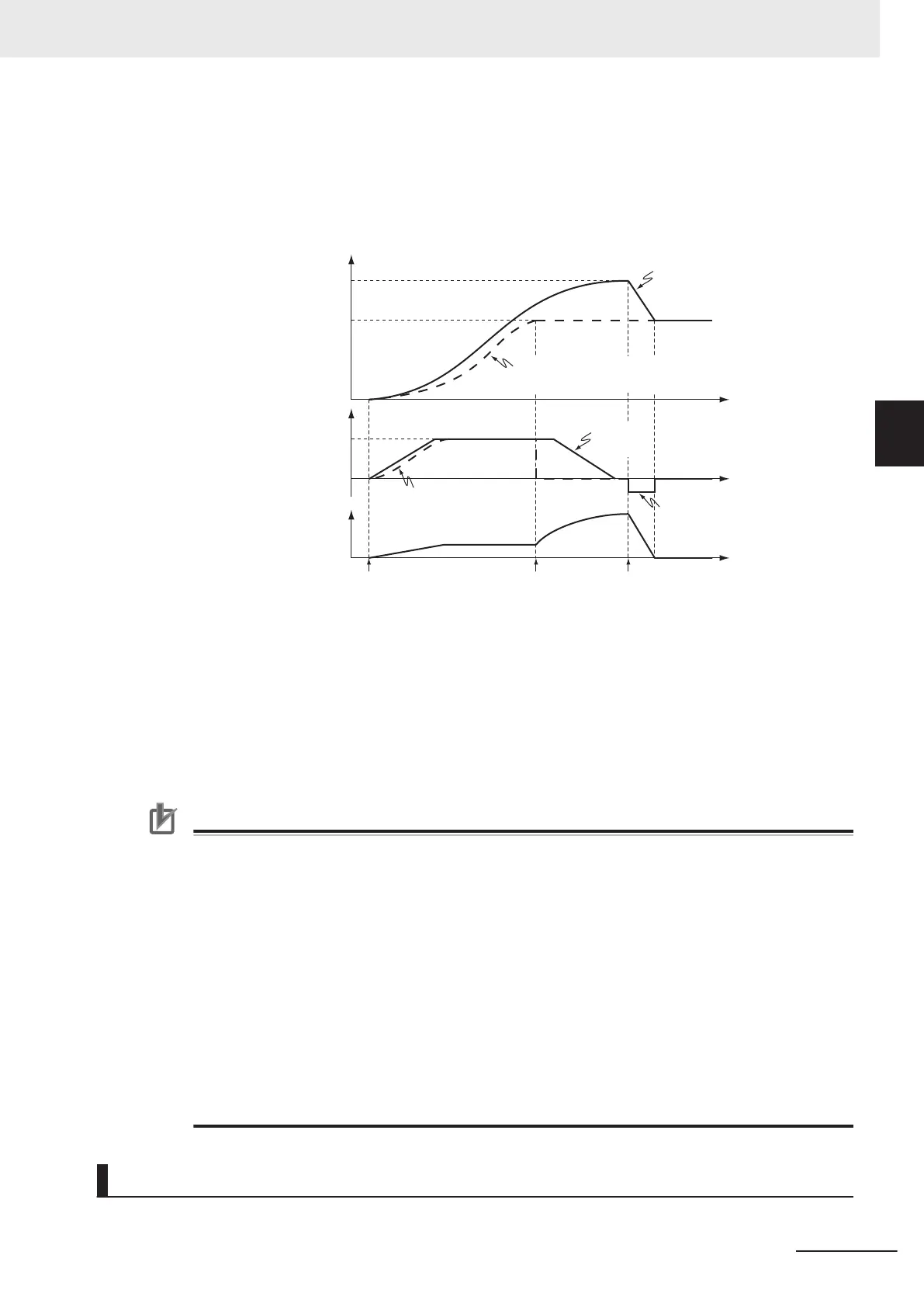
For example, when a following error occurs in the holding operation shown below, you can execute
this instruction to implement a position command in the reverse direction and therefore set the fol-
lowing error to 0.
CommandAborted for the instruction for which the following error occurred changes to TRUE and
instruction execution is aborted.
Start
Holding
Reset Following
Error Counter executed.
Following error
Velocity
Command
velocity
Actual velocity
(actual velocity
of motor)
Position
Holding stop position
Command position
Actual position
(actual position of motor)
Command sent to set
the following error to 0.
Time
Time
Time
Target position in the holding
direction
(position command value)
Target velocity in the holding
direction
(velocity command value)
• When the following error is set to 0, the Maximum V
elocity value that is set in the axis parameters
is used to implement a position command. Maximum Acceleration and Maximum Deceleration
are not used.
• When the command to the new target position is completed, the Done output variable changed to
TRUE.
• This instruction implements a command position in the reverse direction to the direction in which the
following error occurred, but the Operation Selection at Reversing axis parameter is not used.
Precautions for Correct Use
• Execute this instruction only when the axis velocity is low.
This instruction implements a command value in the opposite direction to the previous in-
struction (e.g., in the opposite direction to the holding direction). If the axis speed is too high
when this instruction is executed, the controlled system may be subjected to shock.
•
Before you execute this instruction for a vertical axis, for which constant torque is required,
make sure that the torque will not become insufficient.
• If an NX-series Pulse Output Unit is used, the following error in the Servo Drive that is con-
nected to the Pulse Output Unit is not reset. Refer to the NX-series Position Interface Units
User’s Manual (Cat. No. W524) for details.
• Executing this Instruction for the Master Axis of Synchronized Control
If this instruction is executed for the master axis of synchronous control when the command
position is used as the synchronization data for the master axis, the slave axis will move in
the reverse direction according to the gear ratio or cam data variable.
Refer to 1-1-3 Precautions for Master and Auxiliary Axes in Synchronized Control on page
1-6 for precautions on the master axis.
Instruction Details
This section describes the instruction in detail.
3 Axis Command Instructions
3-169
NY-series Motion Control Instructions Reference Manual (W561)
MC_ResetFollowingError
3
Function