MC_Axis000
Hm1_D
Vel_InVel
BufferMode
VEL
Jer
k
Active
Axis Axis
Execute
InVelocity
Velocity
Busy
Deceleration
Error
Direction
Continuous
MC_MoveVelocity
Acceleration
CommandAborted
ErrorID_eMC_DIRECTION#_mcPositiveDirection
LREAL#1000.0
LREAL#100000.0
Vel
_Bsy
Vel_Act
Vel_Ca
Vel_Err
Vel_EIrrD
LREAL#100000.0
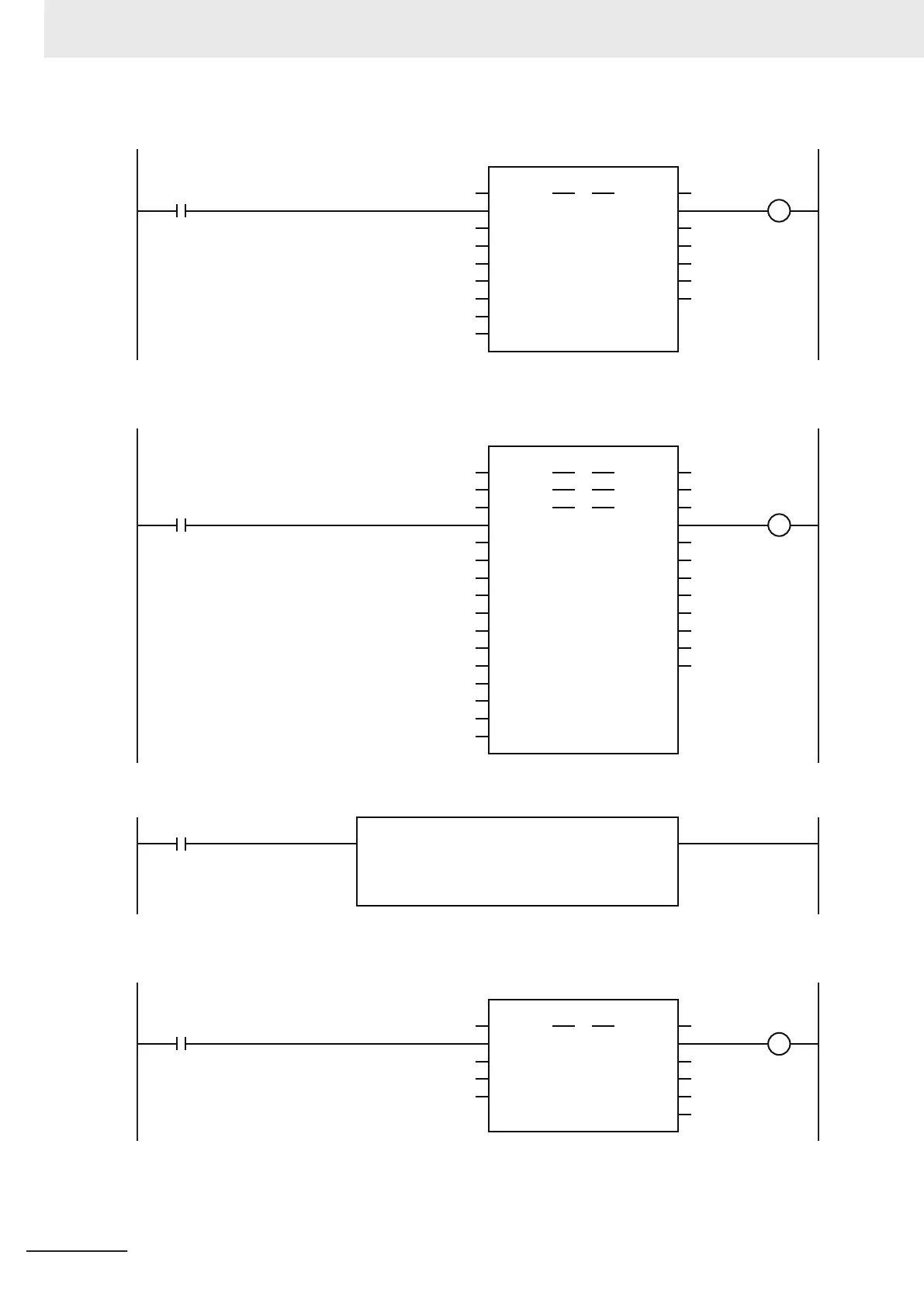
The MC_MoveVelocity (Velocity Control) instruction is executed after homing is completed for axis 1.
MasterScaling
Sla
veScaling
MasterOffset
SlaveOffset
ReferenceType
CAMIN
StartMode
InCam
Master Master
Slave
Slave
CamTable CamTable
Periodic
EndOfProfile
CommandAborted
Error
Active
StartPosition
Busy
MasterStartDistance
MC_CamIn
Execute
InSync
Index
Direction
BufferMode
CamTransition
ErrorID
MC_Axis000
MC_Axis001
CamProfile0
Vel
_InVel
_eMC_DIRECTION#_mcNoDirection
_eMC_REFERENCE_TYPE#_mcCommand
_eMC_START_MODE#_mcRelativePosition
BOOL#TRUE
LREAL#20.0
LREAL#40.0
LREAL#1.0
LREAL#1.0
LREAL#0.0
LREAL#0.0
Camin_InCam0
Camin_Bsy
Camin_Act
Camin_Ca
Camin_Err
Camin_ErrID
Camin_InSync
Camin_EOP
Camin_Index
The MC_CamIn (Start Cam Operation) instruction is executed if
Vel_InVel is TRUE for the MC_MoveVelocity
(Velocity Control) instruction.
Camin_InCam0
CamOut_Ex changes to TRUE if Camin_InCam0 is TRUE and MC_Axis001.Act.Pos exceeds 1000.
Note: The contents of the inline
ST are given below.
MC_Axis001
Camout_D
DecRate2 C
amout_Bsy
Camout_Ca
Camout_Err
Camout_ErrID
CAMOUT
Sla
ve
Execute
Slave
Deceleration
OutMode Error
ErrorID
CommandAborted
MC_CamOut
Jerk
Done
Busy
Camout_Ex
The MC_CamOut (End Cam Operation) instruction is executed when Camout_Ex changes to TRUE.
The deceleration rate is specified by DecRate2.
Contents of Inline ST
3 Axis Command Instructions
3-206
NY-series Motion Control Instructions Reference Manual (W561)