Therefore, processing to change to CSP Mode is performed when the Status output variable from the
MC_Power (Power Servo) instruction changes to F
ALSE.
Operation for Failure to Switch Control Mode
If the Servo Drive does not complete switching the Control Mode within 1 second after a Control Mode
switch command is sent to the Servo Drive, a Error in Changing Servo Drive Control Mode (error code:
7439 hex) occurs.
Also, if the switching criterion is not met within 10 seconds after the command velocity is changed to 0
for a Control Mode switching command to the Servo Drive, an Error in Changing Servo Drive Control
Mode (error code: 7439 hex) occurs.
When an Error in Changing Servo Drive Control Mode (error code: 7439 hex) occurs, the command
velocity is changed to 0 and the Servo is turned OFF (free-run stop).
For details on the Error in Changing Servo Drive Control Mode (error code: 7439 hex), refer to the NY-
series Industrial Panel PC / Industrial Box PC Motion Control User’s Manual (Cat. No. W559).
Applicable Axes and Execution Condition
• You can use this instruction for a servo axis.
To use this instruction, change Enable for the MC_Power instruction to TRUE (Servo ON).
• A virtual servo axis will acknowledge this instruction at any time.
However, processing to switch the Control Mode of the Servo Drive is not performed.
• An error occurs if the instruction is executed for an encoder or virtual encoder axis.
Axis Variable Status
Status.Continuous (Continuous Motion) in the Axis Variable status changes to TRUE.
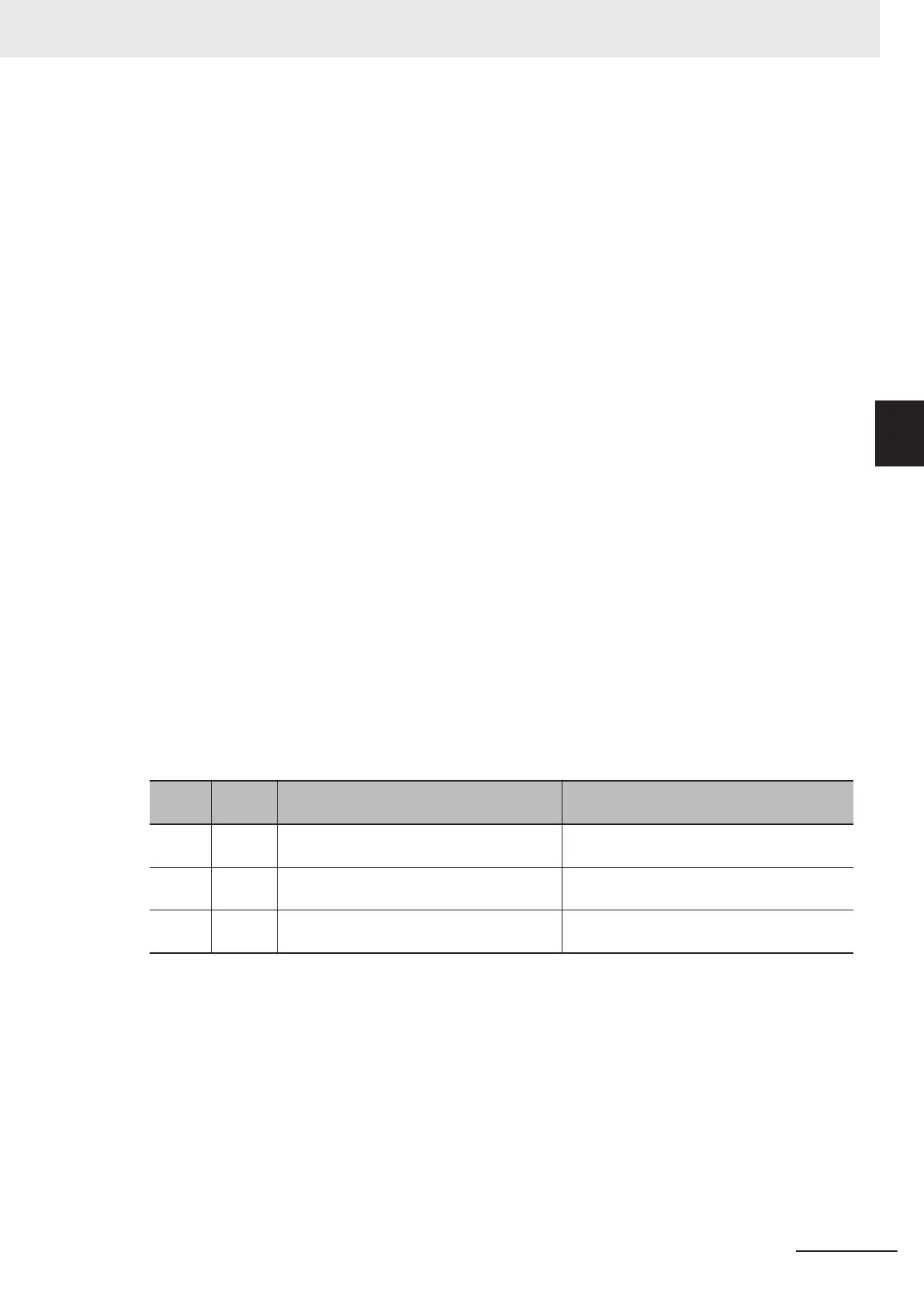
Use DrvStatus (Servo Drive Status) in the Axis Variable to check the Control Mode that is set in the
Servo Drive. The Servo Drive status is given in the following table.
Name
Data
type
Meaning Description
CSP BOOL Cyclic Synchronous Position (CSP) Control
Mode
TRUE when the Servo is ON and the Servo
Drive is in CSP Mode.
CSV BOOL Cyclic Synchronous Velocity (CSV) Control
Mode
TRUE when the Servo is ON and the Servo
Drive is in CSV Mode.
CST BOOL Cyclic Synchronous Torque (CST) Control
Mode
TRUE when the Servo is ON and the Servo
Drive is in CST Mode.
Home Status
If CmdPosMode (Command Current Position Count Selection) is set to _mcCount, the home will re-
main defined.
Overrides
Overrides are disabled for this instruction.
Software Limits
Software Limits are enabled for this instruction.
3 Axis Command Instructions
3-397
NY-series Motion Control Instructions Reference Manual (W561)
MC_SyncMoveVelocity
3
Function