Velocity (Target Velocity), Acceleration (Acceleration Rate), Deceleration (Decel-
eration Rate), and Jerk
• Set V
elocity, Acceleration, Deceleration, and Jerk to specify the interpolation velocity, acceleration
rate, deceleration rate, and jerk for circular interpolation.
• If you set the interpolation velocity for circular interpolation to 0, a velocity specification error will oc-
cur and operation will stop for all axes in the group.
• If the specified interpolation velocity exceeds the maximum velocity of an axis, the following opera-
tion is executed.
If only one axis exceeds the
maximum velocity
: This axis moves at the maximum velocity and the interpolation velocity is
adjusted accordingly
.
If both axes exceed the maxi-
mum velocity
: The interpolation velocity is automatically adjusted so that the axes move
at the maximum velocity of the two axes that is slower
.
Jerk
The relationships between Acceleration
(Acceleration Rate), Deceleration (Deceleration Rate), and
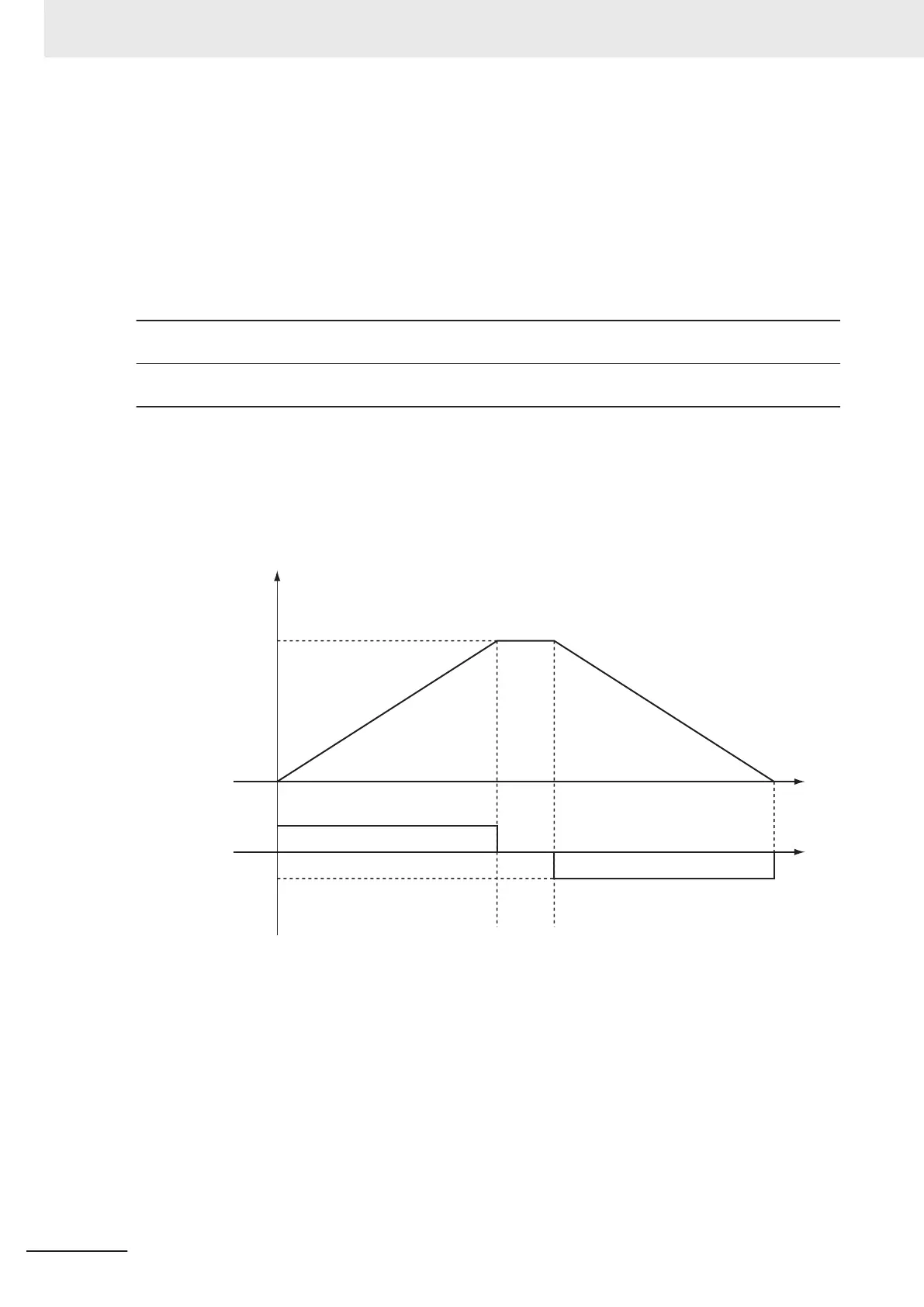
Velocity (Target Velocity) when Jerk is set to 0 and when it is set to any other value are shown below.
• Jerk Set to 0
The command value for the velocity is created with acceleration rate At and deceleration rate Dt.
Vt
At
-Dt
Time
Time
Deceleration rate
Acceleration rate
Interpolation velocity
Vt: Specified interpolation velocity, At: Specified acceleration rate, Dt: Specified deceleration rate.
• Short Travel Distance When Jerk Is 0
The interpolation velocity will not reach the specified Vt (Target Velocity).
4 Axes Group Instructions
4-54
NY-series Motion Control Instructions Reference Manual (W561)