a : Disabled
b : Standby
c : Moving
d : Stopping
e : ErrorStop
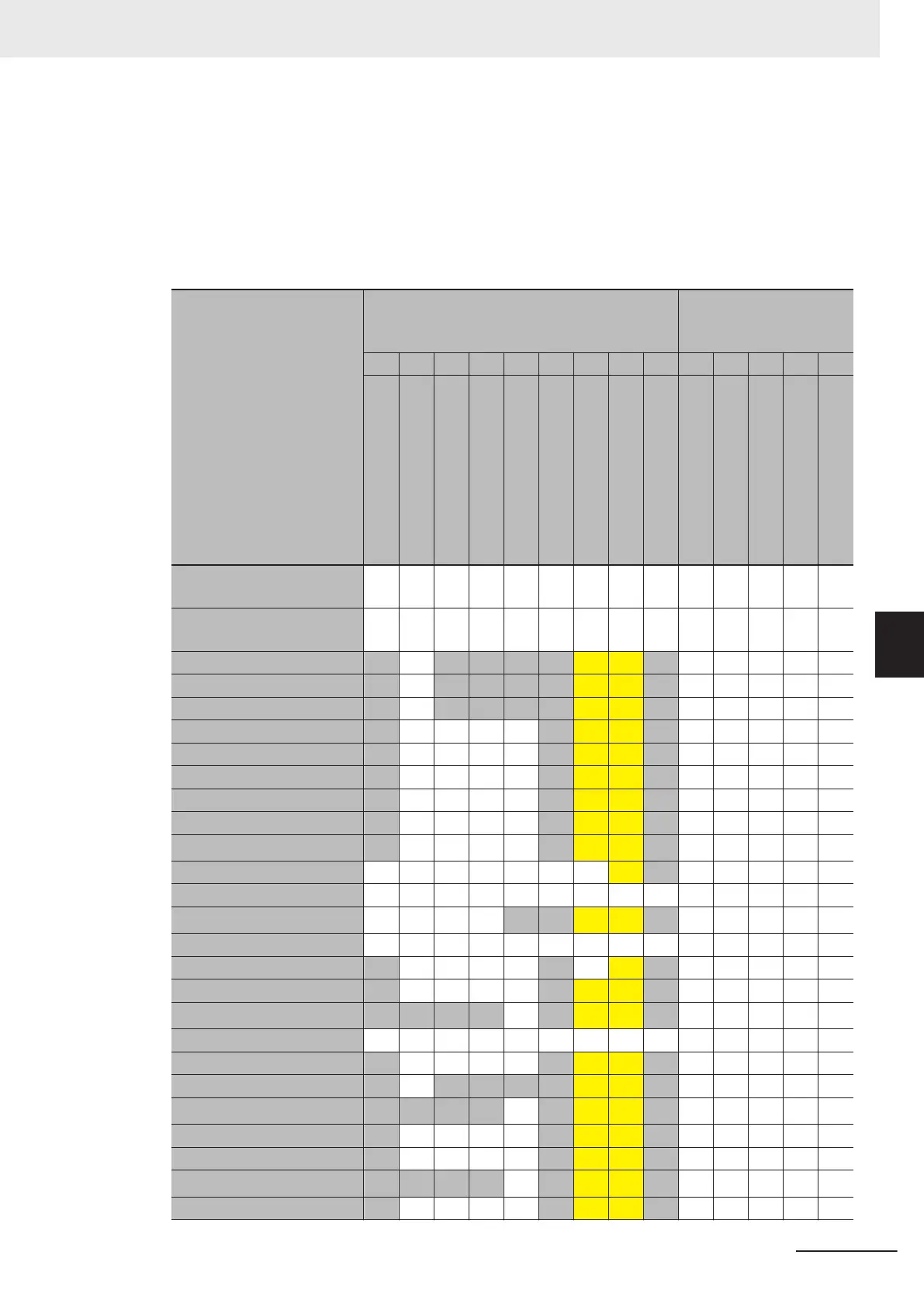
Axis Command Instructions
Instruction
Axis status before instruction execution
Axes group status be-
fore instruction execu-
tion
A B C D E F G H I a b c d e
Axis Disabled
Standstill
Discrete Motion
Continuous Motion
Synchronized Motion
Homing
Deceleration Stopping
Error Deceleration Stopping
Coordinated Motion
Axes Group Disabled
Standstill
Moving
Deceleration Stopping
Error Deceleration Stopping
MC_Power with Enable =
TRUE
*1
B C D E F G H I a b c d e
MC_Power with Enable =
F
ALSE
A A A A A A A H I a b
*2
d e
MC_MoveJog H D H H H H G H I a e e e e
MC_Home H F H H H H G H I a e e e e
MC_HomeWithParameter H F H H H H G H I a e e e e
MC_Move H C C C C H G H I a e e e e
MC_MoveAbsolute H C C C C H G H I a e e e e
MC_MoveRelative H C C C C H G H I a e e e e
MC_MoveVelocity H D D D D H G H I a e e e e
MC_MoveZeroPosition H C C C C H G H I a e e e e
MC_MoveFeed H
*3 *3 *3 *3
H G H I a e e e e
MC_Stop A G G G G G G H I a e e e e
MC_ImmediateStop H H H H H H H H I a e e e e
MC_SetPosition A B
F
*4
D
*5
H H G H I a e e e e
MC_SetOverride A B C D E F G H I a b c d e
MC_ResetFollowingError H B G G G H G H I a e e e e
MC_CamIn H E E E E H G H I a e e e e
MC_CamOut H H H H
C
*6
H G H I a e e e e
MC_CamMonitor A B C D E F G H I a b c d e
MC_GearIn H E E E E H G H I a e e e e
MC_GearInPos H E H H H H G H I a e e e e
MC_GearOut H H H H
C
*7
H G H I a e e e e
MC_MoveLink H E E E E H G H I a e e e e
MC_CombineAxes H E E E E H G H I a e e e e
MC_Phasing H H H H
E
*8
H G H I a e e e e
MC_TorqueControl H D D D D H G H I a e e e e
Appendices
A-5
NY-series Motion Control Instructions Reference Manual (W561)
A-1 Instructions for Which Multi-execution Is Supported
A
A-1-2 State Transitions and Instructions for which Multi-execution Is Supported