13
13-74
32180 Group User’s Manual (Rev.1.0)
CAN MODULE
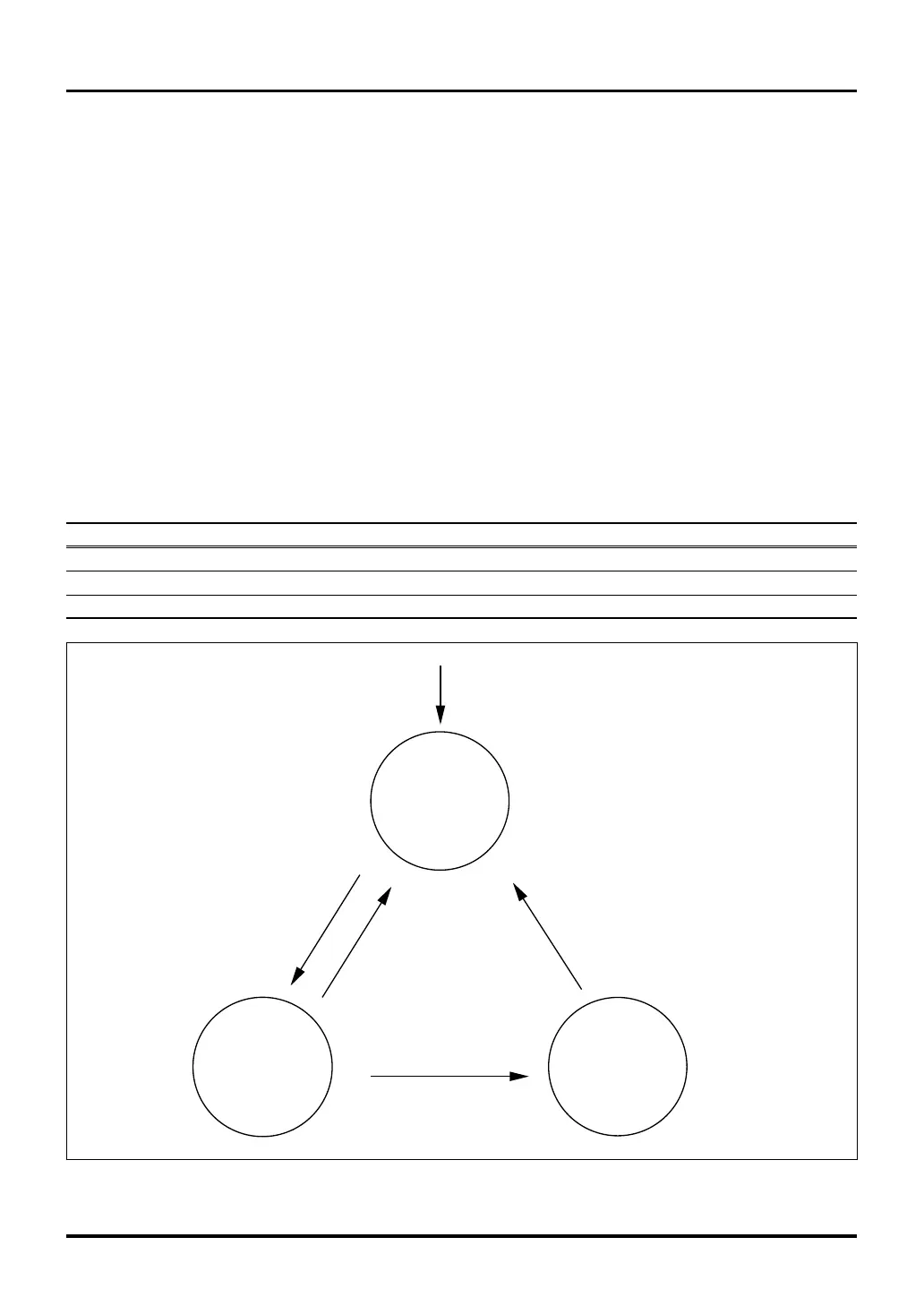
13.3.3 CAN Controller Error States
The CAN controller assumes one of the following three error states depending on the transmit error and receive
error counter values.
(1) Error active state
• This is a state where almost no errors have occurred.
• When an error is detected, an active error flag is transmitted.
• The CAN controller is in this state immediately after being initialized.
(2) Error passive state
• This is a state where many errors have occurred.
• When an error is detected, a passive error flag is transmitted.
(3) Bus off state
• This is a state where a very large number of errors have occurred.
• CAN communication with other nodes cannot be performed until the CAN module returns to an error active state.
Error Status of the Unit Transmit Error Counter Receive Error Counter
Error active state 0–127 AND 0–127
Error passive state 128-255 OR 128 and over
Bus off state 256 and over –
Transmit error counter > 255
Transmit error counter ≥ 128
OR
receive error counter ≥ 128
Transmit error counter < 128
AND
receive error counter < 128
11 consecutive recessive bits
detected on CAN bus 128 times
or reset by software
Error active
state
Error passive
state
Bus off state
Initial setting
13.3 CAN Protocol
Figure 13.3.4 CAN Controller Error States

 Loading...
Loading...