5.10 Detailed Troubleshooting
YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07) 257
Troubleshooting
5
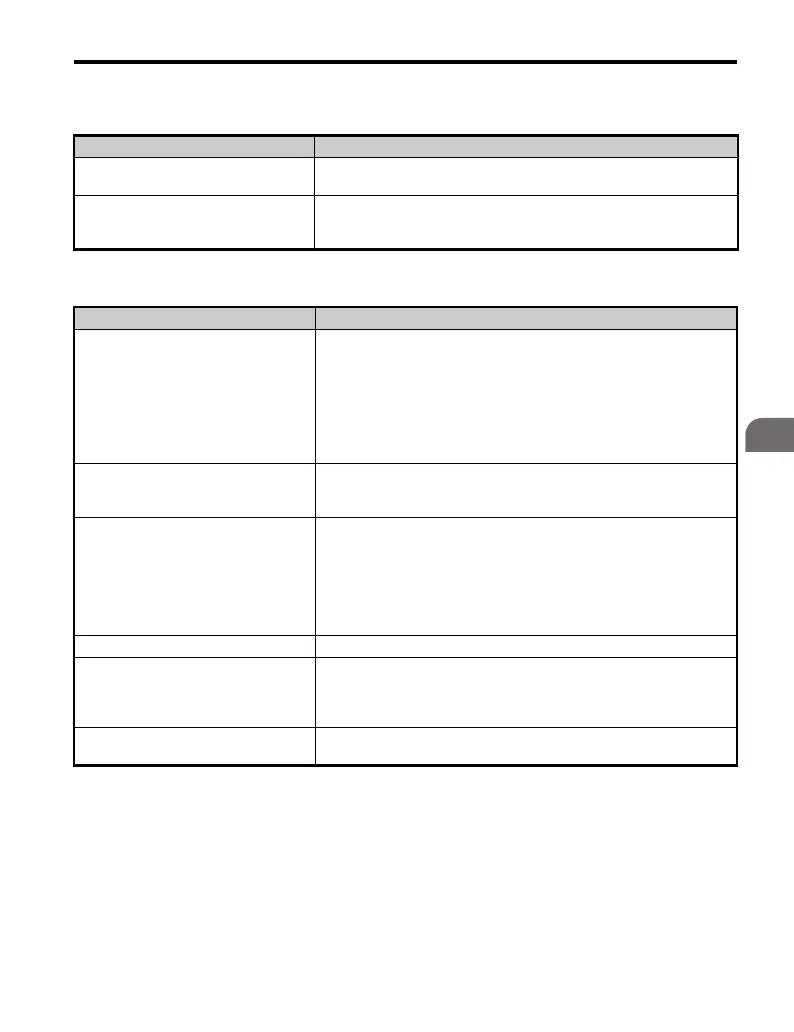
Unexpected Noise from Connected Machinery
■ Oscillation or Hunting
Cause Possible Solutions
The carrier frequency is at the resonant
frequency of the connected machinery.
Adjust the carrier frequency using parameters C6-02 through C6-05.
The drive output frequency is the same
as the resonant frequency of the
connected machinery.
• Adjust the parameters used for the Jump Frequency function (d3-01
through d3-04) to skip the problem-causing bandwidth.
• Place the motor on a rubber pad to reduce vibration.
Cause Possible Solutions
Insufficient tuning in Open Loop Vector
Control.
• Adjust the following parameters in the order listed to get better gain.
• A decrease in gain should be followed with an increase in the primary
delay time constant.
C4-02 (Torque Compensation Primary Delay Time)
n2-01 (Speed Feedback Detection Control [AFR] Time Constant 1)
C3-02 (Slip Compensation Primary Delay Time)
• The response for torque compensation and slip compensation will drop
as the time constant is increased.
Auto-Tuning has not yet been performed
(required for Open Loop Vector Control).
• Perform Auto-Tuning.
• Set motor parameters after calculating the proper values.
• Change the motor control method to V/f Control (A1-02 = “0”).
Insufficient tuning in Open Loop Vector
Control.
• Adjust the following parameters in the order listed to get better gain.
• A decrease in gain should be followed with an increase in the primary
delay time constant.
C4-02 (Torque Compensation Primary Delay Time)
n1-02 (Hunting Prevention Gain Setting)
• The response for torque compensation and slip compensation will drop
as the time constant is increased.
Gain is too low when using PID control. Check the period of oscillation and adjust P, I, and D settings accordingly.
The frequency reference is assigned to an
external source.
• Ensure that noise is not affecting the signal lines.
• Separate main circuit wiring and control circuit wiring.
• Use twisted-pair cables or shielded wiring for the control circuit.
• Increase the analog input time filter constant (H3-13).
The cable between the drive and motor is
too long.
• Perform Auto-Tuning.
• Reduce the length of the cable.

 Loading...
Loading...










