B.2 Parameter Table
370 YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07)
9 Baseblock Command (N.C.)
Open: No drive output
Closed: Normal operation
OOO—
A Accel/Decel Ramp Hold
Closed: The drive pauses during acceleration or
deceleration and maintains the output frequency.
OOO—
B Drive Overheat Alarm (OH2) Closed: Displays an OH2 alarm O O O —
C Terminal A2 Enable
Open: Terminal A2 disabled
Closed: Terminal A2 enabled
OOO—
F Not used
Select this setting when not using the terminal or when
using the terminal in a pass-through mode.
In the pass-through mode, the terminal functions as a
contact input for the drive and PLC.
OOO—
10 Up Command Open: Maintains the current frequency reference
Closed: Increases or decreases the current frequency
reference
Ensure that the increase and decrease commands are set
in conjunction with one another. Also set the source of
the frequency reference to the control terminals
(b1-01 = 1).
OOO—
11 Down Command O O O —
12 Forward Jog
Closed: Runs forward at the Jog Frequency specified
in d1-17.
OOO—
13 Reverse Jog
Closed: Runs reverse at the Jog Frequency
specified in d1-17.
OOO—
14 Fault Reset
Closed: Allows the drive to run again after the fault is
cleared and the run command is removed.
OOO—
15 Fast-Stop (N.O.)
Closed: Decelerates at the Fast-Stop time C1-09.
Once the Fast-stop command is cleared, the drive will
not operate until the run command is also cleared.
OOO—
16 Motor 2 Selection
Open: Motor 1 (E1-, E2-)
Closed: Motor 2 (E3-, E4-)
Note: Motor 2 cannot be a PM motor.
OOO—
17 Fast-stop (N.C.) Closed: Decelerates according to C1-09 (Fast-stop Time) O O O —
18 Timer Function
Set the timer delay using parameters b4-01 and b4-02.
Ensure this function is set in conjunction with the multi-
function output timer (H2- = 12).
OOO—
19 PID Disable Closed: PID control disabled O O O —
1A Accel/Decel Time Selection 2
By combining Accel/Decel Time 2, the user can switch
from C1-05 to C1-08.
OOO—
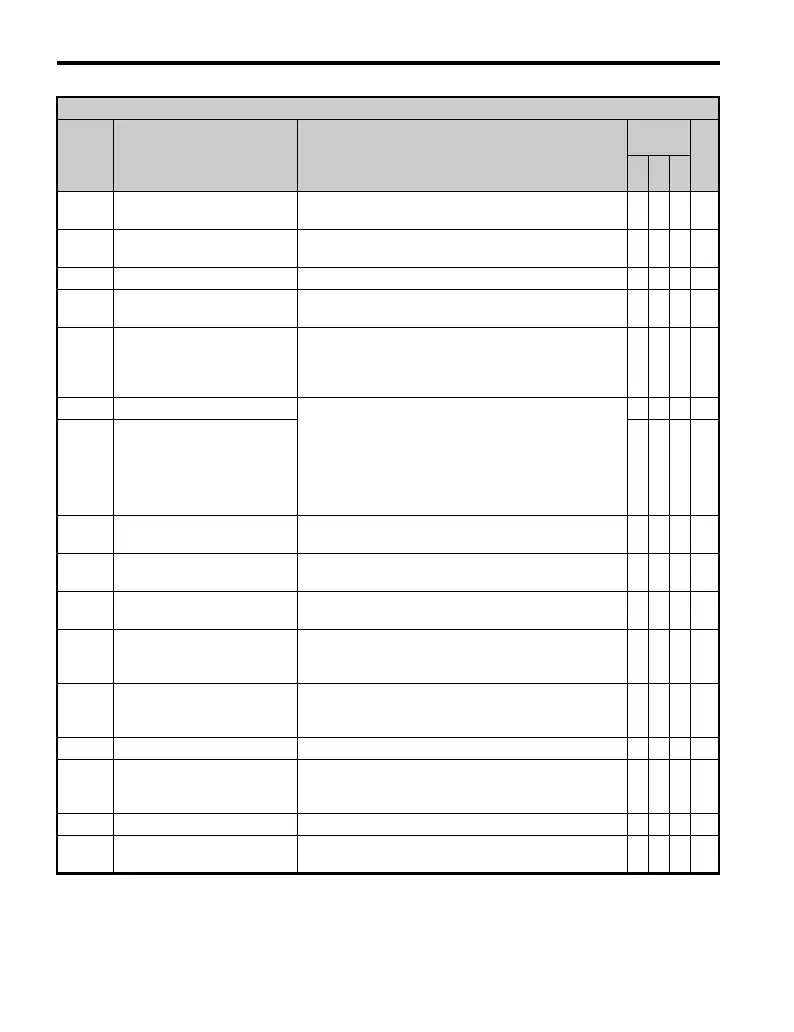
H1 Multi-Function Digital Input Selections
H1-
Setting
Function Description
Control
Mode
Pg.
V/
f
O
LV
P
M

 Loading...
Loading...










